Introduction
The central processing unit calculates the exact coordinates down to the micrometer. The sensors confirm the precise position of the chip. Yet, without a physical mechanism to translate those digital calculations into physical force, the robot remains frozen. Movement is utterly impossible without actuators. Actuators serve as the bridge between digital intelligence and physical action. In modern robotics, these components are responsible for every physical action, from an autonomous mobile robot opening a facility door to a multi-axis industrial arm welding an automotive chassis. At RobotsOps, we focus on breaking down these complex automation frameworks into foundational knowledge. Understanding actuators in robotic systems is the first major step toward mastering mechatronics, motion control systems, and autonomous industrial design.
Understanding Actuators in Robotics
What Is an Actuator?
An actuator is a mechanical device responsible for moving or controlling a mechanism or system. It takes energy—which can be electrical, hydraulic, or pneumatic—and converts it into a physical, measurable motion.
- Definition: A component that converts energy into controlled physical movement.
- Why it matters: Without actuators, a robot can process data but cannot execute physical changes in its environment.
- Real-world example: A robotic gripper closing around a box to lift it off a shelf.
- Engineering challenge: Minimizing energy loss during the conversion of power to physical torque.
- Practical robotics solution: Utilizing brushless permanent-magnet systems to maximize power transfer efficiency.
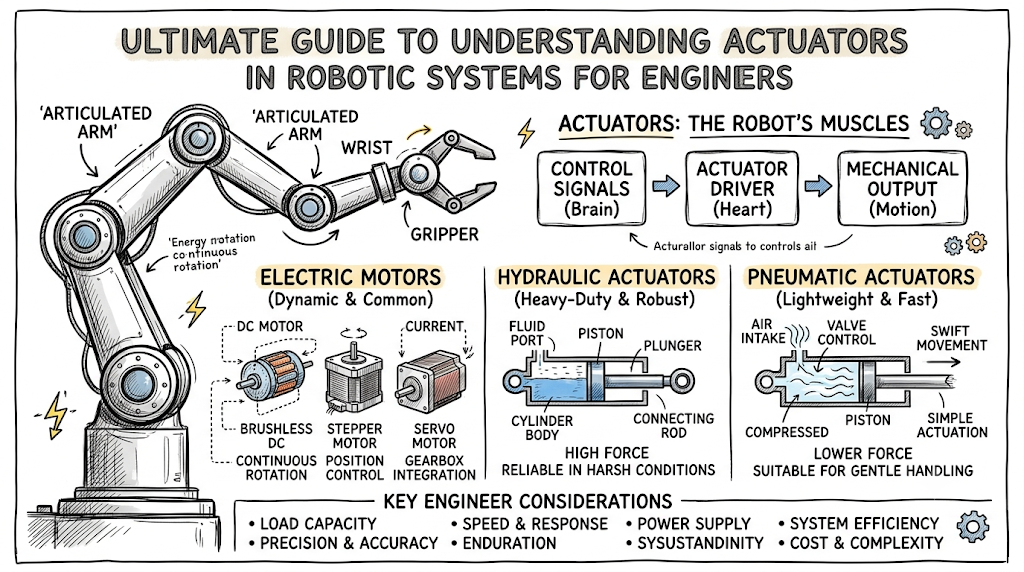
In Simple Terms: Think of the controller as the brain of the robot and the sensors as its eyes and ears. The actuator is the muscle. It is the part that does the heavy lifting, pulling, turning, and pushing.
Why Robots Need Actuators
Robots are defined by their ability to interact with the physical world autonomously. This interaction requires force, speed, and directional change. Actuators provide the mechanical power required to overcome gravity, inertia, and friction, transforming a static metal structure into a functional machine.
How Actuators Convert Energy into Motion
Actuators operate by receiving a command signal from a control source. This signal regulates the flow of incoming energy through a valve, switch, or driver circuits. This energy then acts upon an internal mechanism—such as a rotor, piston, or gear train—causing the output shaft or rod to displace linearly or rotationally.
Relationship Between Actuators and Robot Movement
Every degree of freedom (DoF) in a robot typically requires its own actuator. By coordinating multiple actuators simultaneously, a robot can achieve complex motion paths, maintain balance, change orientation, and manipulate external objects with high velocity and repeatable accuracy.
Key Takeaways
- Actuators function as the physical muscles of any robotic architecture.
- They transform electrical, fluid, or air energy into mechanical force.
- Every controllable joint or axis on a robot relies directly on an independent actuator system.
The Role of Actuators in Robotic Systems
Creating Motion
The primary function of an actuator is to create kinetic displacement. Whether it is driving a wheel across a concrete warehouse floor or spinning a high-speed milling spindle, the actuator establishes the baseline kinetic energy for the entire machine.
Controlling Force
Beyond mere movement, robots must control how hard they push or pull against an object. Actuators allow systems to modulate torque so that a robot can firmly clamp a heavy steel beam without dropping it, or gently hold a fragile egg without breaking the shell.
Precision Positioning
Modern manufacturing requires sub-millimeter repeatability. Actuators, when paired with feedback devices, move components to explicit geometric coordinates, maintaining positional stability under variable payloads.
Interaction with Physical Environments
Robots must constantly adapt to external resistance. Actuators allow a robot to exert counter-force when drilling, contouring, smoothing, or polishing surfaces during industrial fabrication.
Enabling Autonomous Operations
Autonomous operations require immediate responses to changing environments. Actuators execute real-time path corrections dictated by navigation algorithms, allowing a robot to avoid sudden obstacles or track moving targets safely.
Key Takeaways
- Actuators manage both the velocity of movement and the magnitude of applied force.
- Precision positioning allows robots to achieve high levels of structural repeatability.
- Controlled physical interaction allows safe operations around changing environmental conditions.
Robotics System Architecture
A functional robot relies on a unified loop of components working together. To understand how a robot moves, you must look at how its architecture coordinates data and power.
[Sensors] --------> [Controller (Brain)] --------> [Actuators (Muscles)]
^ |
| v
+------------------ Feedback Loop -------------------+
Sensors
Sensors collect environmental data and internal states. They measure variables like position, velocity, temperature, and proximity, feeding this information back to the central processor.
Controllers
The controller acts as the central processor or brain. It interprets sensor data, runs software algorithms, and calculates the necessary adjustments required to meet the robot’s programming goals.
Actuators
Actuators receive the low-power electronic instructions from the controller and use high-power energy sources to execute the physical movement.
Power Systems
Power systems supply the foundational energy required by the robot. This includes battery banks for mobile units, three-phase electrical connections for factory cells, or central air compressors for pneumatic setups.
Communication Components
Communication components pass data protocols between the controller, drivers, and external networks, ensuring that all components stay synchronized without lag.
Sensors → Controller → Actuator Workflow
Consider an autonomous mobile robot navigating a corridor:
- Sensors: An optical LiDAR sensor detects a wall 10 centimeters ahead.
- Controller: The navigation processor calculates that the current trajectory will result in a collision and determines a 90-degree right turn is required.
- Actuator: The controller sends a low-voltage signal to the motor driver, which directs electrical current into the left-wheel electric actuator, causing it to rotate forward while slowing down the right-wheel actuator to execute the turn.
Key Takeaways
- Robotic systems function as a continuous closed-loop architecture.
- Sensors observe, controllers decide, and actuators execute the physical action.
- Power systems must be closely matched to the specific energy demands of the installed actuators.
Types of Actuators Used in Robotics
Robotics relies on three main types of energy mediums to generate physical motion. Choosing the right medium fundamentally changes how a robot behaves, how much weight it can carry, and how fast it can operate.
Electric Actuators
Electric actuators use electrical energy to generate rotational or linear movement. They are the most common actuator types in robotics due to their precise control, clean operation, and straightforward integration.
DC Motors
- How it works: Direct current passes through internal windings, creating a magnetic field that rotates the motor shaft.
- Benefits: Simple to operate, affordable, and delivers high starting torque.
- Limitations: Brushed varieties suffer from mechanical wear and electrical noise over time.
- Typical use cases: Small educational mobile robots, toy drive systems, and basic conveyor belts.
Servo Motors
- How it works: A standard motor paired with a rotational position feedback device (encoder) and a dedicated control circuit.
- Benefits: Offers exact control of angular position, velocity, and acceleration.
- Limitations: High system cost and complex tuning profiles required.
- Typical use cases: Multi-axis industrial robotic arms, camera pan-tilt platforms, and walking humanoid joints.
Stepper Motors
- How it works: Rotates in discrete, fixed angular steps by energizing specific internal electromagnetic coils in a strict sequence.
- Benefits: Excellent positioning capabilities without requiring a costly closed-loop encoder.
- Limitations: Can lose registration steps if overloaded; exhibits high vibration at low speeds.
- Typical use cases: 3D printer axes, CNC desktop tooling, and automated laboratory pipetting systems.
Brushless Motors
- How it works: Moves the permanent magnets to the rotor and places the electromagnets on the stator, alternating current electronically without physical brushes.
- Benefits: High efficiency, long operational lifespan, outstanding power-to-weight ratio.
- Limitations: Requires specialized Electronic Speed Controllers (ESCs) to manage commutation.
- Typical use cases: Drone propellers, autonomous mobile robot drive wheels, and high-speed pick-and-place systems.
Hydraulic Actuators
Hydraulic actuators utilize pressurized liquids—typically specialized oils—to drive pistons or fluid motors. They are selected when brute force and immense weight capacities are required.
- Working Principles: A central pump forces non-compressible fluid through high-pressure hoses into a cylinder chamber, forcing a piston rod outward with immense mechanical pressure.
- Advantages: Capable of producing massive forces; holds rigid positions perfectly even when powered down.
- Limitations: Vulnerable to messy fluid leaks; requires bulky external pumps, reservoirs, and complex plumbing networks.
- Industrial Applications: Heavy-duty material handling robots, autonomous mining excavators, and massive metal forge loading systems.
Pneumatic Actuators
Pneumatic actuators utilize compressed ambient air to generate rapid linear or rotational motion. They are highly favored for basic, repetitive tasks that demand speed over variable positioning.
- Working Principles: Compressed air enters a sealed chamber, expanding against a internal piston or diaphragm to stroke a rod back and forth.
- Advantages: Extremely fast travel speeds, lightweight, low unit cost, and structurally safe in explosive environments.
- Limitations: Poor precision control due to the natural compressibility of air; struggles with mid-stroke positioning.
- Industrial Applications: High-speed packaging sorting lines, automotive stamping presses, and food-grade pick-and-place assembly cells.
Key Takeaways
- Electric actuators provide unparalleled precision and clean operation across most applications.
- Hydraulic systems excel at lifting massive payloads but require high-maintenance fluid setups.
- Pneumatic units offer high speed and simple deployment for binary, two-position tasks.
Electric Actuators in Detail
Motor Components
An electric actuator contains several key structural components: the stator (stationary outer housing with electromagnets), the rotor (rotating inner shaft with permanent magnets), bearings to reduce friction, and a feedback sensor like an optical or magnetic encoder.
Torque Generation
Torque is produced via Lorentz force interactions. When an electrical current flows through the stator windings, it creates a rotating magnetic field. This field exerts a powerful magnetic pull on the rotor magnets, generating a rotational force around the center shaft.
Speed Control
Speed is governed by regulating the voltage or utilizing Pulse Width Modulation (PWM). By cycling the power on and off thousands of times per second, the motor driver alters the average voltage delivered to the windings, smoothly controlling the rotation speed.
Position Control
Position control relies on closed-loop feedback. The encoder constantly counts lines or tracks magnetic angles on the spinning shaft, sending real-time position updates to the controller. A proportional-integral-derivative (PID) loop adjusts the power output to stop the shaft exactly at the target angle.
[Controller Target] ---> (PID Math) ---> [Motor Driver] ---> [Electric Motor]
^ |
| v
+------------------ Encoder Feedback Data -------------------+
Energy Efficiency
Modern brushless electric actuators achieve energy efficiencies above 90%. They pull power only when creating movement or holding a load against external forces, making them perfect for battery-powered robotic mobile platforms.
Key Takeaways
- Torque output is directly proportional to the electrical current passing through the internal coils.
- Encoders are required to turn a simple spinning motor into a precision tracking servo loop.
- PWM control allows microcontrollers to manage high-power electric motors safely and efficiently.
Hydraulic Actuators in Detail
Hydraulic Power Generation
The process begins at a central Hydraulic Power Unit (HPU). An electric motor drives a heavy-duty displacement pump, drawing hydraulic oil from a reservoir and pressurizing the entire fluid circuit to thousands of pounds per square inch (PSI).
Fluid Pressure Systems
Proportional control valves regulate the directional flow of this highly pressurized fluid. When a valve opens, fluid streams into one side of an actuator cylinder, exerting equal pressure across the entire internal surface area of the piston face.
Force Output
Because fluids are virtually non-compressible, energy transfer is direct and immediate. The force output ($F$) generated by a hydraulic cylinder is a direct function of the fluid pressure ($P$) multiplied by the cross-sectional area ($A$) of the internal piston:
$$F = P \times A$$
This simple formula explains why small hydraulic cylinders can easily lift payloads weighing several tons.
Heavy-Duty Robotics Applications
In heavy-duty industrial environments, hydraulic actuators power large robotic arms that handle hot foundry castings, lift structural steel frames, or operate subsea remotely operated vehicles (ROVs) operating under intense deep-sea ambient pressures.
Key Takeaways
- Hydraulic systems rely entirely on non-compressible fluids to transmit raw mechanical power.
- Force output is determined by multiplying system fluid pressure by internal cylinder surface area.
- These systems are ideal for heavy lifting but require substantial floor space for support machinery.
Pneumatic Actuators in Detail
Compressed Air Systems
Pneumatic infrastructure relies on a centralized air compressor that filters, dries, and compresses ambient air into a pressurized storage tank. This air is then regulated and routed through flexible plastic tubing to the automated machinery.
Motion Generation
Directional control valves direct the compressed air into the front or rear port of a pneumatic cylinder. As air molecules fill the chamber, they expand rapidly, driving the internal piston slide to its mechanical end-stop.
Lightweight Automation
Because air cylinders are constructed primarily from lightweight aluminum, plastics, and simple rubber seals, they add minimal dead weight to an automation cell. This allows them to move quickly without adding excessive structural mass to the machine frame.
Manufacturing Applications
Pneumatics are widely used in factory automation for sorting doors, ejecting defective products off conveyor tracks, clamping sheet metal components during assembly, and running vacuum-suction gripper configurations.
Key Takeaways
- Pneumatics utilize compressed ambient air to generate fast, low-cost linear motion.
- The inherent compressibility of air makes precise mid-stroke position control difficult.
- Pneumatic components are highly valued for simple, binary sorting and clamping tasks.
Linear vs Rotary Actuators
Actuators are also classified by the geometric path of their mechanical output. Choosing between a straight line or a circular spin fundamentally dictates how a robot’s joints are assembled.
Linear Motion
Linear actuators produce movement in a straight line along a single axis. They push and pull loads over a fixed travel distance, known as the stroke length.
Rotary Motion
Rotary actuators produce a spinning or twisting motion around a central pivot point. Their movement is measured in angular displacement, degrees, or continuous revolutions per minute (RPM).
Selection Criteria
Engineers choose between linear and rotary configurations based on the desired movement path, space constraints, mounting orientations, and the mechanical advantages needed to move a specific payload.
Comparison Table
| Feature | Linear Actuator | Rotary Actuator |
| Primary Motion Path | Straight line (Push/Pull) | Circular (Rotation/Twisting) |
| Measurement Units | Millimeters / Inches | Degrees / Radians / RPM |
| Common Mechanisms | Lead screws, belts, cylinders | Gearboxes, direct-drive rotors |
| Precision Control | Excellent for axial tracking | Outstanding for angular indexing |
| Typical Robotics Use | Gantry Z-axis, lifting columns | Joint pivots, drive wheels, swivels |
Key Takeaways
- Linear actuators focus force along a single straight-line axis.
- Rotary actuators provide continuous or angular rotational motion around a pivot point.
- Mechanisms like ball screws can convert rotary motion into linear motion when needed.
Actuator Performance Characteristics
Torque
Torque is the rotational twisting force produced by an actuator. High torque is required to lift heavy loads, accelerate large mechanical links quickly, and overcome static friction inside heavy geartrains.
Speed
Speed defines how fast an actuator can travel across its full range of motion. High-speed capabilities are critical for minimizing factory cycle times in high-volume pick-and-place packaging operations.
Accuracy
Accuracy represents the actuator’s ability to move to an absolute requested target coordinate. An accurate actuator will hit its target position reliably based on reference design points.
Precision
Precision, often referred to as repeatability, is the actuator’s ability to return to the exact same position multiple times consecutively. High precision ensures consistent production quality over long shifts.
Power Consumption
Power consumption measures the electrical current or fluid volume required to operate under load. Lower consumption improves battery life on mobile robots and cuts energy costs in large factory installations.
Load Capacity
Load capacity is the maximum weight or force an actuator can safely support and move without structural deflection, mechanical failure, or stalling out the drive system.
Reliability
Reliability tracks the Mean Time Between Failures (MTBF). High reliability reduces unexpected factory downtime and lowers regular maintenance costs over the system’s operational lifecycle.
Key Takeaways
- Torque and speed share an inverse relationship in most actuator geartrains.
- Accuracy focuses on hitting a specific target, while precision focuses on hitting the same spot every time.
- Load capacity calculations must factor in both static holding weight and dynamic forces during fast movements.
How Engineers Select Actuators
Selecting the perfect actuator requires analyzing mechanical requirements, environmental factors, and project constraints.
Load Requirements
Engineers calculate the total mass, center of gravity, and dynamic inertia of the load. The actuator must provide enough torque or force to move the payload comfortably without overheating.
Speed Requirements
The system must meet explicit cycle-time targets. Designers analyze speed profiles to ensure the actuator accelerates, travels, and decelerates within the designated time frames.
Precision Requirements
If an application demands sub-millimeter tolerances, engineers select high-resolution closed-loop servo motors. For simple material transfers, lower-cost options can be used.
Environmental Conditions
Operating environments dictate the required protection ratings. Dusty foundries, washdown food facilities, and explosive chemical plants require specialized enclosures and seal selections.
Power Availability
Mobile robots are limited by onboard DC battery voltages, whereas fixed assembly line automation cells have access to high-voltage AC grid power or plant-wide compressed air networks.
Budget Constraints
Engineering teams balance component performance with financial realities, avoiding over-specifying costly components when simpler, more economical options will get the job done safely.
Practical Engineering Scenario
- The Mission: Select an actuator to drive the main arm joint of a collaborative assembly robot.
- Analysis: The joint needs to lift 5 kilograms smoothly, stop within 0.05 millimeters, fit inside a narrow housing, and run safely around human operators.
- The Solution: The engineer selects a high-torque brushless DC motor paired with a zero-backlash harmonic gear reducer and an absolute dual-encoder loop. This setup delivers high torque, precise tracking, and a compact footprint.
Key Takeaways
- Actuator selection requires a balance between mechanical load demands and electrical power constraints.
- Environmental factors like dust, water, and heat can quickly ruin unprotected actuator components.
- Over-specifying performance capabilities drives up project budgets unnecessarily.
Actuators in Different Robot Types
Industrial Robots
Industrial articulated arms regularly handle heavy components at high speeds. They rely almost exclusively on high-voltage AC servo motors mated to heavy-duty planetary or cycloidal gearboxes for maximum torque and structural rigidity.
Collaborative Robots (Cobots)
Cobots work alongside human operators. They utilize lightweight brushless motors integrated with safety-rated force torque sensors, allowing them to stop immediately if they touch a person or obstacle.
Autonomous Mobile Robots (AMRs)
AMRs operate on battery power while navigating warehouse floors. They use highly efficient, low-voltage DC brushless wheel actuators to extend operational battery life per charge.
Medical Robots
Surgical robots demand extreme accuracy and zero mechanical backlash. They employ specialized, micro-electric coreless motors that provide smooth, steady adjustments during delicate operations.
Service Robots
Commercial delivery or cleaning robots prioritize low unit cost, quiet operation, and reliable performance. They typically use integrated brushed or brushless DC gearmotors for basic movement tasks.
Humanoid Robots
Humanoid platforms mimic human bio-mechanics. They require high power density in compact spaces, using a mix of advanced frameless torque motors, linear screw drives, and complex tension-cable routing networks.
Key Takeaways
- Industrial arms prioritize raw speed, heavy torque, and rigid mechanical builds.
- Mobile robots rely on high-efficiency DC configurations to get the most out of their batteries.
- Surgical and collaborative systems put safety and precise positioning above raw speed and power.
Real-World Applications of Robotic Actuators
Manufacturing Automation
- Objective: Spot weld automotive steel door panels with high speed and consistency.
- Actuator Type Used: High-precision AC electric servo units with heavy gearboxes.
- Benefits Achieved: Uniform weld quality, continuous 24/7 assembly speeds, and zero manual human welding hazards.
Warehouse Robotics
- Objective: Sort, move, and organize heavy inventory pods inside fulfillment hubs.
- Actuator Type Used: Low-profile, high-efficiency brushless DC wheel drive systems.
- Benefits Achieved: Optimized inventory space, faster shipping turnarounds, and reduced human walking fatigue.
Healthcare Robotics
- Objective: Assist orthopedic surgeons in aligning bone implants precisely during joint replacements.
- Actuator Type Used: Ultra-precise, low-backlash miniature DC servo drives.
- Benefits Achieved: Improved placement accuracy, less surgical trauma for patients, and faster recovery times.
Aerospace Robotics
- Objective: Inspect and rivet large carbon-composite wing profiles on long assembly fixtures.
- Actuator Type Used: High-capacity rigid linear ball screw actuators.
- Benefits Achieved: Repeatable drilling force, perfect fastener alignment, and comprehensive digital tracking.
Agricultural Robotics
- Objective: Automatically identify and pick ripe fruit from orchard branches without bruising it.
- Actuator Type Used: Sensitive electric actuators equipped with soft, flexible pneumatic end-grippers.
- Benefits Achieved: Continuous harvesting capability, lower seasonal labor dependencies, and reduced food waste.
Defense Robotics
- Objective: Safely disarm and dispose of unexploded ordnance in unpredictable field conditions.
- Actuator Type Used: Rugged, sealed electric actuators protected by weather-resistant housings.
- Benefits Achieved: Keeps personnel at a safe distance, handles harsh weather, and provides delicate manipulation control.
Key Takeaways
- Electric servos form the backbone of modern high-speed automotive production lines.
- Combining different actuator types—like electric arms with pneumatic grippers—delivers versatile performance.
- Ruggedized enclosures allow actuators to perform reliably in extreme agricultural and defense settings.
Common Challenges with Actuators
Wear and Tear
Continuous friction degrades internal geartrains, motor brushes, and fluid seals over time.
- Solution: Follow scheduled maintenance intervals for lubrication and implement regular seal replacement routines.
Heat Generation
Enclosed electric windings produce significant thermal energy under heavy continuous loads.
- Solution: Integrate aluminum cooling fins, active fan ventilation, or temperature sensors that scale back performance before damage occurs.
Energy Consumption
Large actuator arrays pull considerable power, increasing operational costs or draining mobile batteries quickly.
- Solution: Use regenerative braking systems to capture braking energy and select high-efficiency motor configurations.
Precision Loss
Mechanical wear introduces backlash, creating small physical gaps between gear teeth that reduce positioning accuracy.
- Solution: Use zero-backlash strain-wave gearsets or implement software compensation models to correct for wear.
Mechanical Failure
Overloading joint linkages can snap internal drive shafts or strip teeth off geartrains.
- Solution: Install physical slip clutches, set strict digital current limits, and use torque-limiting sensors.
Environmental Factors
Dust, water, and chemical washdowns can corrode internal electronics or contaminate lubricants.
- Solution: Upgrade to housings with appropriate IP ratings (such as IP67 or IP69K) and use corrosion-resistant coatings.
Key Takeaways
- Friction and heat are the main challenges that limit actuator lifespans.
- Backlash can be managed using zero-backlash geartrains or real-time software adjustments.
- Matching IP ratings to the operating environment protects sensitive internal electronics from damage.
Emerging Actuator Technologies
Smart Actuators
Modern smart actuators integrate a motor, controller, drive electronics, and network communications into a single unit. They monitor their own health, tracking variables like temperature and vibration to alert maintenance teams before a breakdown happens.
Soft Robotics Actuators
Soft robotics moves away from rigid metal frames, using flexible elastomers that expand or contract when filled with air, gas, or liquids. These compliant designs are inherently safe around humans and can handle delicate, oddly shaped items easily.
Artificial Muscles
Artificial muscles try to match the force-to-weight ratio of biological muscle tissue. These systems use specialized materials that contract quickly when exposed to electrical currents or temperature changes.
Electroactive Polymers
Electroactive Polymers (EAPs) are smart plastics that change shape or size when stimulated by an electric field. They offer smooth, organic movements for micro-robotics and biomimetic designs.
Shape Memory Alloys
Shape Memory Alloys (SMAs) are metals that remember their original shape. When cool, they can be easily bent, but heating them with an electrical current causes them to snap back to their original shape with considerable force.
Key Takeaways
- Smart actuators handle their own control loops and monitor health conditions internally.
- Soft robotics uses flexible materials to handle delicate objects safely around humans.
- New materials like EAPs and SMAs are changing how we design micro-robots and lifelike movements.
Actuators and AI-Powered Robotics
Adaptive Motion Control
AI algorithms analyze sensor feedback mid-motion, allowing actuators to adjust their force and speed dynamically when handling objects of unknown weight, shape, or stiffness.
Autonomous Decision Making
Instead of following fixed paths, AI-driven robots calculate optimal movement trajectories on the fly. Actuators respond to these shifting paths in real time, making autonomous navigation smoother and more efficient.
Intelligent Movement Optimization
By analyzing performance data over time, machine learning models can tweak actuator acceleration ramps. This reduces mechanical stress, cuts energy use, and speeds up cycle times across factory floors.
Predictive Maintenance
AI systems monitor real-time current draw and thermal profiles from smart actuators. By spotting tiny variations from normal operations, the software predicts component failures weeks before they happen, allowing teams to plan repairs without disrupting production.
Key Takeaways
- AI enables actuators to adjust force dynamically based on changing real-time conditions.
- Machine learning models optimize movement paths to reduce mechanical wear and cut energy costs.
- Predictive analytics analyze current and heat data to prevent unexpected factory downtime.
Common Beginner Mistakes
Confusing Motors and Actuators
Beginners often use these terms interchangeably. A motor is simply the component that generates raw rotational force. An actuator is the complete assembly—including the motor, gear reducers, encoders, and control linkages—that delivers controlled physical motion.
Ignoring Load Calculations
Failing to calculate dynamic inertia is a common pitfall. A motor might have enough torque to hold a heavy arm static, but it can easily stall or overheat when trying to swing that same arm quickly.
Overlooking Environmental Factors
Using standard open-frame motors in dusty woodworking shops or wet environments leads to rapid component failure. Always verify that your hardware’s protection ratings match the real-world operating conditions.
Selecting Incorrect Actuator Types
Choosing a fast pneumatic cylinder for a task that requires precise positioning, or an expensive electric servo for a simple push-button operation, creates unnecessary design issues and drives up costs.
Underestimating Maintenance Requirements
Many beginners treat mechanical systems like software, assuming they will run forever without attention. All physical mechanisms need regular upkeep, including lubrication checks, belt tensioning, and seal replacements.
Key Takeaways
- A motor provides raw rotation, while an actuator provides a fully controlled movement system.
- Always calculate dynamic acceleration forces, not just static holding weights.
- Regular maintenance is essential for keeping mechanical hardware running reliably over time.
Future of Actuators in Robotic Systems
Human-Like Motion
Future actuator designs will focus on matching the smooth versatility of human muscles. Combining compliant mechanics with high-resolution feedback will allow robots to move with greater fluidity and natural balance.
Energy-Efficient Robotics
As sustainability becomes a central focus in manufacturing, new developments will target lower power consumption. Future actuators will use lighter materials, advanced power electronics, and better energy-recovery systems to do more work with less power.
Smart Factories
Next-generation production facilities will feature fully connected infrastructure. Actuators will communicate directly with plant-wide networks, sharing performance updates and adjusting operations automatically to keep production lines balanced.
Autonomous Systems
As mobile robots take on more complex roles outdoors, actuators will need to adapt. Future designs will focus on rugged, self-contained units that can handle mud, water, dust, and extreme temperatures without losing precision.
Next-Generation Robotics
The evolution of automation will depend on building smaller, stronger, and smarter movement systems. Breakthroughs in materials science will allow actuators to deliver higher torque from smaller footprints, opening up new possibilities for advanced automation.
Key Takeaways
- Future designs will focus on smoother, more compliant movements that match human capabilities.
- Energy efficiency and power recovery will be crucial for sustainable factory operations.
- Advanced materials will allow future actuators to deliver higher power from more compact designs.
FAQ Section
1. What is an actuator in robotics?
An actuator is a mechanical device that takes stored energy (such as electricity, pressurized fluid, or compressed air) and transforms it into controlled physical movement. It serves as the physical muscle that allows a robotic system to interact with its environment.
2. Are motors and actuators the same thing?
No, they are not the same thing. A motor is a specific component that creates rotational force. An actuator is the complete system, which combines the motor with gearboxes, positional feedback sensors, and control linkages to deliver a fully manageable movement path.
3. Which actuator is best for industrial robots?
Electric servo actuators are generally the best choice for industrial robots. They offer outstanding precision, repeatable accuracy, clean operation, and can be programmed easily to handle complex, multi-axis paths.
4. What is the difference between pneumatic and hydraulic actuators?
Pneumatic actuators use compressed air to generate fast, low-cost linear movements but struggle with precise mid-stroke positioning. Hydraulic actuators use non-compressible liquids to generate massive forces for heavy lifting but require bulky pumps and regular leak maintenance.
5. Why are actuators important in robotics?
Actuators are critical because they turn digital decisions into physical actions. Without them, a robot can process sensor data and calculate paths but cannot actually move, lift objects, or make any changes in the real world.
6. Can an electric motor function as a linear actuator?
Yes, it can. By mating a rotary electric motor to a mechanical conversion system—such as a ball screw, lead screw, or timing belt assembly—the motor’s rotational output is turned into a clean, straight-line push-and-pull movement.
7. What does closed-loop feedback mean for an actuator?
Closed-loop feedback means the actuator uses a sensing device, like an encoder, to track its actual physical position in real time. It constantly sends these updates back to the controller, which automatically adjusts the power to fix any positional errors.
8. What is backlash in an actuator geartrain?
Backlash is the tiny clearance or play between mating gear teeth. This physical gap can cause small positioning errors when the motor reverses direction, which is why high-precision robots use specialized zero-backlash geartrains.
9. How do you prevent an actuator from overheating?
You can prevent overheating by calculating your load requirements accurately, integrating appropriate heat sinks or cooling fans, setting strict current limits in your driver software, and using thermal sensors to scale back performance before damage occurs.
10. What are smart actuators?
Smart actuators are all-in-one units that combine the motor, encoder, drive electronics, and network communications into a single housing. They can process control loops locally and monitor their own internal health, tracking variables like temperature and vibration.
Final Summary
Understanding actuators in robotic systems is essential for anyone working in modern automation. These components serve as the critical bridge that transforms digital commands into controlled physical force. Electric actuators provide the clean precision needed for detailed assembly tasks, hydraulic systems deliver the muscle for heavy-duty lifting, and pneumatic components offer fast, straightforward action for simple sorting operations. By analyzing performance factors like torque, speed, and accuracy, engineers can design efficient, reliable systems tailored to real-world challenges.