Introduction
Robots are transitioning from highly confined industrial workcells directly into our shared human environments. For decades, traditional machines executed fixed, hard-coded scripts behind protective safety fencing. If an unexpected object or person blocked their path, they lacked the capacity to adapt; they simply faulted out or risked causing a collision. Today, we are witnessing a monumental structural shift from these manually programmed or rigidly automated machines toward true autonomous systems.
This transformation is reshaping how modern industries handle labor constraints, operational efficiency, and safety. Understanding autonomous robotics is no longer just an elective for academic researchers—it is a core requirement for automation engineers, startup founders, software developers, and strategic business leaders. To explore deep-dive resources on robotics infrastructure, modern automation tools, and deployment frameworks, check out the educational platform RobotsOps.
Featured Snippet: What Are Autonomous Robots?
Autonomous Robots are advanced, intelligent machines capable of performing complex tasks, navigating unstructured environments, and making operational decisions without direct human intervention. By integrating Artificial Intelligence (AI), deep sensor fusion, and real-time edge processing, these systems independently perceive their surroundings, compute optimal actions, and safely execute missions in dynamic real-world settings.
Understanding Robotics Fundamentals
What Is a Robot?
At its core, a robot is an engineered machine capable of executing a series of physical actions automatically. A standard robotic system comprises three interconnected domains: sensors to gather data, software controllers to process information, and actuators (such as motors, hydraulic cylinders, or pneumatic joints) to exert force and perform physical work.
Evolution of Robotics
The timeline of robotics moves from rigid mechanical automation to dynamic cognitive intelligence. The early eras focused on stationary mechanical arms executing repetitive, high-speed trajectories in automotive assembly lines. The current era centers on mobile, cognitive, and collaborative systems that work seamlessly alongside humans in unmapped, changing environments.
Manual Robots vs. Automated Robots
- Manual Robots: These machines rely entirely on real-time human control. Examples include standard teleoperated explosive ordnance disposal (EOD) drones or surgical robotic systems where a human doctor directly manipulates every micro-movement via a console.
- Automated Robots: These systems function without continuous human steering but remain rigidly bound to pre-programmed instructions. A classic automated guided vehicle (AGV) in a legacy factory follows a visible magnetic tape track stuck to the concrete floor. If a box falls across that magnetic line, the AGV halts indefinitely until a human operator moves the box. It cannot think, recalculate, or steer around the obstacle.
Rise of Intelligent Machines
The modern inflection point is the fusion of physical robotic hardware with advanced computing power—often referred to as Physical AI. Instead of executing hard-coded if-then scripts, modern intelligent machines handle environmental ambiguity by learning from raw data, recognizing abstract patterns, and synthesizing novel solutions to complex operational scenarios on the fly.
In Simple Terms
Imagine a standard train versus a modern self-driving car. A train is automated; it follows a fixed track and stops at predefined stations, completely incapable of steering around a tree branch on the rails. A self-driving car is autonomous; it has no fixed physical tracks and must continuously evaluate pedestrians, weather conditions, lane markings, and changing traffic signals to safely chart its own unique path.
Real-World Example
Walk into any high-throughput logistics center. You will see autonomous mobile robots gliding across floors without any painted guidelines or embedded wires, safely passing human workers and dynamically recalculating their paths to deliver heavy inventory shelves directly to packing stations.
Common Misconception
People frequently assume that if a machine moves on its own, it must be autonomous. In reality, a factory arm wrapping pallets for ten hours straight is simply automated. It has no awareness of its environment; if you alter the pallet size without updating the underlying source code, the automated machine will malfunction. True autonomy requires situational awareness and independent decision-making.
Key Takeaways
- Robotics has evolved from rigid, isolated industrial automation to flexible, unconstrained environmental autonomy.
- Automated machines run on unyielding scripts; autonomous machines adapt to real-time changes.
- Modern autonomous robotics relies heavily on the integration of Physical AI and real-time data interpretation.
What Are Autonomous Robots?
Definition of Autonomous Robots
An autonomous robot is a self-contained system that senses its environment, processes that sensory data to construct a digital model of the world, reasons about tasks, and executes movements to achieve high-level goals without human guidance.
Core Characteristics
To qualify as truly autonomous, a system must consistently manifest four operational pillars:
- Environmental Adaptability: The capacity to operate safely within unmapped or constantly changing spaces.
- Self-Navigation: Moving from point A to point B without human steering, mechanical tracks, or external positioning beacons.
- Task Independence: Executing complex, multi-step actions (such as identifying and picking a specific item from a mixed storage bin) based on generalized programmatic goals.
- Operational Self-Preservation: Monitoring internal health parameters (such as battery depletion or motor overheating) and detecting external safety hazards to prevent system damage or human injury.
How They Differ from Traditional Robots
Traditional industrial robots function as blind executors of spatial coordinates. They work under the assumption that their environment is perfectly static. Autonomous robots function as active explorers. They assume their environment is fundamentally chaotic, relying on real-time sensory loops to construct a reliable operational path.
Why Autonomy Matters
Autonomy unlocks unprecedented scalability. When a machine requires a dedicated human operator, your operational throughput is structurally throttled by human availability and fatigue. Autonomous systems break this dependency, allowing enterprises to scale up workflows, lower long-term overhead costs, and eliminate human exposure to toxic, hazardous, or physically exhausting work settings.
In Simple Terms
An autonomous robot is a machine that is given a destination or a goal (e.g., “clean the third-floor hallway”), but is left entirely to its own devices to figure out exactly how to navigate the terrain, dodge obstacles, and complete the job safely.
Real-World Example
Consider autonomous delivery droids operating on college campuses. They navigate busy public sidewalks, wait for pedestrian traffic to clear, and recalculate their routes if a construction barrier suddenly blocks their primary path.
Common Misconception
Many believe that autonomous robots are completely unpredictable because they make their own choices. However, these systems operate within strict algorithmic boundaries and safety constraints. Their unpredictability is bounded; they choose the safest path to a goal, not random actions.
Key Takeaways
- Autonomy is defined by independent goal execution in unpredictable settings.
- Traditional systems require static environments; autonomous systems navigate environmental chaos.
- Transitioning to autonomous architecture removes operational bottlenecks and improves workspace safety.
How Autonomous Robots Work
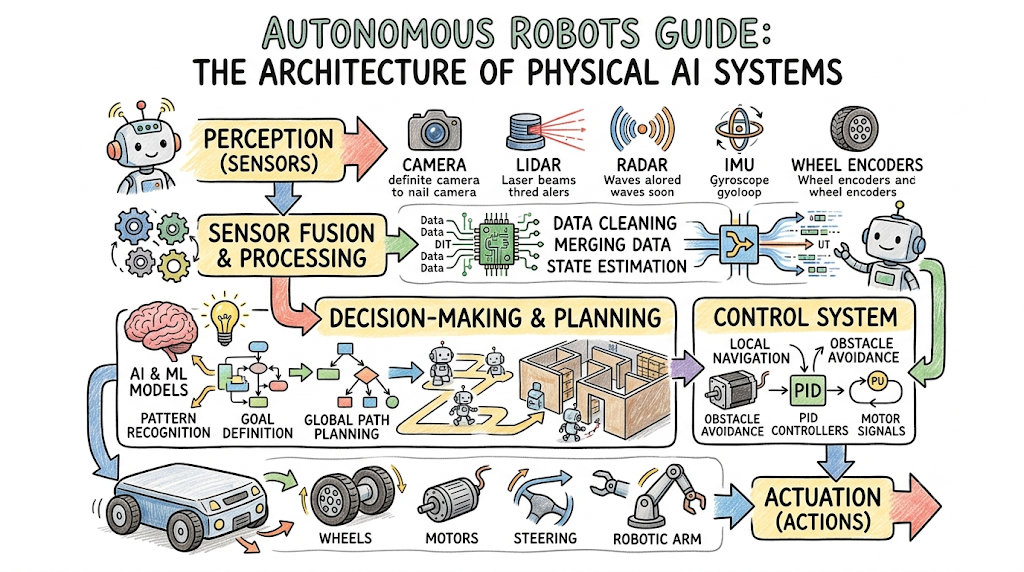
The operational cycle of any autonomous robot can be broken down into a continuous, real-time feedback loop. This process is known in systems engineering as the Sense-Plan-Act pipeline.
+--------------------------------------------------------+
| PERCEPTION |
| (Gathers raw data via LiDAR, Cameras, Radar, IMUs) |
+------------------------------------+-------------------+
|
v
+------------------------------------+-------------------+
| DECISION-MAKING |
| (State Estimation, Semantic Mapping, AI Inference) |
+------------------------------------+-------------------+
|
v
+------------------------------------+-------------------+
| NAVIGATION & PATH PLANNING |
| (Global Mapping + Local Obstacle Avoidance) |
+------------------------------------+-------------------+
|
v
+------------------------------------+-------------------+
| ACTION EXECUTION |
| (Low-level Motor Controls & Actuator Command) |
+------------------------------------+-------------------+
|
v
+------------------------------------+-------------------+
| CONTINUOUS LEARNING |
| (Edge Adaptation & Fleet-wide Data Telemetry) |
+--------------------------------------------------------+
1. Perception
The cycle begins with data ingestion. The robot uses an array of on-board sensors to observe its surroundings and monitor its own physical state. This raw data includes distance measurements, visual video frames, acceleration profiles, and wheel rotation metrics.
2. Decision-Making
Once data is collected, the processing unit cleans, filters, and merges the noisy inputs through an engineering technique called sensor fusion. The robot builds an internal state estimation, answering questions like: Where am I located? What objects are surrounding me? Are those objects static walls or moving people?
3. Navigation
With an updated environmental map, the robot determines how to reach its target. It calculates a collision-free path by running a global route planner (analogous to GPS highway routes) combined with a highly responsive local planner designed to dodge sudden obstacles.
4. Action Execution
The computed path is translated into concrete low-level engineering commands. The control software sends exact voltage or pulse-width modulation signals to the drive motors, steering mechanisms, and robotic joints, turning computational path planning into smooth physical locomotion.
5. Continuous Learning
Modern systems do not reset after completing a task. They continuously log telemetry data. Through on-board machine learning models or centralized cloud updates, the robot improves its future performance, refining how it grips unfamiliar objects or handles slick floor surfaces.
In Simple Terms
Think of how you cross a busy street: Your eyes and ears gather data (Perception). Your brain calculates the speed of incoming cars and decides when it is safe to move (Decision-Making). You chart your line across the asphalt, avoiding puddles (Navigation). Your brain tells your leg muscles to step forward (Action Execution). If you trip on a loose stone, you remember to watch out for that spot next time (Continuous Learning).
Real-World Example
When an autonomous baggage tractor at an airport encounters a sudden baggage cart left in the middle of the tarmac, it instantly stops its sensors, processes that a large metallic object is present, maps a curved trajectory around the cart, accelerates its drive wheels, and safely continues its journey to the plane.
Common Misconception
A common mistake is assuming robots process entire video feeds or sensor logs all at once over the cloud. In reality, to avoid dangerous delays, robots break down sensor data into minimal, compressed point clouds and mathematical arrays that can be calculated locally on the edge in milliseconds.
Key Takeaways
- The fundamental autonomous loop runs continuously through Sense, Plan, and Act phases.
- Sensor fusion combines multiple distinct data streams into one coherent internal map.
- Continuous learning enables systems to adapt to changing environments over extended periods.
Core Technologies Behind Autonomous Robots
True autonomy requires a multi-layered technology stack where advanced hardware and cutting-edge software converge.
Artificial Intelligence (AI)
AI serves as the core cognitive engine. It transitions systems away from simplistic rule-based programming (such as if sensor distance is less than 10cm, turn left) toward complex contextual reasoning, allowing robots to interpret abstract operational goals and handle completely novel environmental variations.
Machine Learning
Machine learning algorithms enable robots to learn from real-world experience. For instance, reinforcement learning models help robotic arms optimize their grasp configurations over thousands of trials, discovering the most secure way to lift fragile or oddly shaped components without manual human reprogramming.
Computer Vision
Using deep convolutional neural networks (CNNs) and visual transformers, computer vision gives robots the ability to understand visual data. This technology allows a robot to not merely detect a generic obstruction, but semantically classify it as an organic obstacle, a critical piece of factory machinery, or a safety barrier.
Sensors
Sensors act as the robot’s window into the physical world. Autonomous designs combine active exteroceptive sensors (such as LiDAR and Radar to measure external distance profiles) with proprioceptive sensors (such as Inertial Measurement Units and wheel encoders to measure internal speed, balance, and orientation).
Robotics Software
The backbone of modern autonomous systems is specialized middleware like the Robot Operating System (ROS / ROS 2). ROS 2 provides an open-source, highly reliable framework that handles low-level hardware abstraction, device drivers, message-passing across software processes, and advanced out-of-the-box navigation libraries.
Edge Computing
Robots cannot afford the latency of sending raw video or high-density spatial maps to a distant cloud server to wait for a navigation command. On-board edge computing hardware—such as specialized AI accelerators and powerful systems-on-chip (SoCs)—allows systems to execute complex deep learning inference locally within milliseconds, ensuring immediate split-second braking and obstacle avoidance.
In Simple Terms
AI and machine learning act as the robot’s brain. Computer vision serves as its eyes, while sensors function like its nervous system. Robotics software is the underlying communication network that links them all together, and edge computing acts as the fast-acting reflex system that keeps the machine moving safely without freezing up.
Real-World Example
Autonomous inventory drones flying through modern distribution centers use on-board edge computers to process computer vision frames at 60 frames per second, instantly reading bar codes and tracking rack positions without requiring a continuous external Wi-Fi connection.
Common Misconception
Many believe that autonomous robots rely completely on a stable, high-speed internet connection to operate safely. While they do use connectivity for fleet monitoring and high-level metric reporting, their fundamental real-time safety and navigation loops must run completely offline on local hardware to prevent accidents during network drops.
Key Takeaways
- Computer vision enables semantic object classification, not just basic proximity detection.
- ROS 2 serves as the industry-standard software infrastructure for building modular robotic software.
- Edge computing hardware is mandatory to keep processing latency within safe operational limits.
Autonomous Robot Architecture
Engineering an autonomous robot requires a modular, layered systems architecture. Each layer has an explicit operational scope and passes standardized data packets to adjacent tiers.
Sensor Layer
The bottom of the stack. This layer includes physical hardware interfaces for LiDARs, stereo cameras, ultrasonic sensors, and IMUs. Its core task is raw data acquisition, converting physical phenomena (light reflections, sound echoes, gravitational forces) into digital data streams.
Processing Layer
This tier receives raw digital data streams and performs filtering, time-synchronization, and coordinate transformations. It runs state estimation algorithms, handles noise cancellation, and executes sensor fusion to output a unified, high-fidelity representation of the environment.
Decision Layer
The cognitive core. This layer evaluates the clean environmental map against the high-level operational goal. It runs behavior trees, finite state machines, and global path-planning algorithms to determine the optimal next actions while adhering to safety protocols.
Control Layer
The translation engine. The control layer takes the desired trajectory from the decision layer and converts it into explicit kinematic targets. It runs closed-loop control algorithms, such as Proportional-Integral-Derivative (PID) loops or Model Predictive Control (MPC), to calculate precise velocity and steering vectors.
Actuation Layer
The physical execution layer. This includes motor drivers, electronic speed controllers (ESCs), electric motors, steering servos, and robotic end-effectors. It converts low-level control signals into mechanical force, driving the robot forward.
In Simple Terms
Think of a factory robot’s architecture like human anatomy. The Sensor Layer represents your eyes and skin. The Processing Layer is your optical nerve cleaning up the image. The Decision Layer is your conscious brain deciding to pick up a coffee cup. The Control Layer is your nervous system calculating which muscles must contract. The Actuation Layer consists of your actual muscles and bones performing the physical lift.
Real-World Example
In an autonomous mining dump truck, the sensor layer tracks a rocky ledge via LiDAR. The processing layer filters out dust clouds from the data. The decision layer notes the path is blocked and picks an alternative haul route. The control layer calculates the exact steering wheel angle required, and the actuation layer fires the hydraulic steering cylinders.
Common Misconception
Developers often assume that a single massive software script can handle everything from sensor reading to motor control. In professional engineering, this monolith approach is rejected. If one sub-system fails or experiences a lag spike, a modular architecture ensures critical safety sub-systems keep running independently.
Key Takeaways
- Autonomous architecture is strictly divided into distinct layers to ensure system modularity and safety.
- The control layer bridges the gap between abstract mathematical paths and real-world mechanical motion.
- Isolating layers prevents single software bugs from causing catastrophic hardware runaways.
Types of Autonomous Robots
Autonomous systems are tailored to distinct environments, mechanical form factors, and operational objectives.
Industrial Robots
Modern industrial autonomy goes beyond traditional static welding arms. Modern autonomous industrial variants feature advanced vision-guided robotic arms that pick unstructured parts from randomized delivery bins, adjusting their approach angles dynamically without needing parts to be precisely aligned beforehand.
Warehouse Robots
Warehouse automation is dominated by Autonomous Mobile Robots (AMRs). Unlike traditional automated vehicles that halt at every obstacle, AMRs utilize on-board natural feature navigation to navigate around dropped pallets, human pickers, and other vehicles, ensuring fulfillment lines keep moving smoothly.
Service Robots
Service robots operate directly in human-centric spaces. This category features autonomous hotel delivery units, retail inventory scanners, and commercial floor scrubbers. These machines require high-level behavioral etiquette algorithms to navigate tightly packed public spaces without causing disruption or discomfort to nearby people.
Agricultural Robots
Operating in vast, dynamic outdoor environments, autonomous agricultural robots handle tasks like mechanical weeding, high-precision pesticide micro-spraying, and automated fruit harvesting. They use advanced computer vision to distinguish cash crops from weeds, working reliably across uneven terrain and shifting outdoor lighting conditions.
Healthcare Robots
Autonomy in healthcare demands extreme precision and security. Autonomous mobile delivery units carry sensitive medications, lab specimens, and surgical gear through busy hospital corridors. Concurrently, specialized UV-C disinfection robots navigate empty operating rooms independently, mapping the space to guarantee total sterilization coverage.
Autonomous Vehicles
From self-driving consumer sedans to autonomous long-haul freight trucks and subterranean mining haulers, these complex systems navigate highly dynamic environments at high speeds. They require ultra-low latency sensor setups that combine long-range radar, high-density LiDAR, and multi-spectral cameras to ensure safe stopping distances.
In Simple Terms
Autonomous robots take on many shapes based on their jobs: some are large wheeled platforms moving boxes in warehouses, others are insect-like quadcopters checking crops from the sky, some look like cabinets on wheels delivering clean towels in hotels, and some are massive self-driving trucks moving industrial materials.
Real-World Example
In modern distribution yards, autonomous yard tractors handle shipping containers without human drivers. They back trailers precisely into tight loading docks, connecting and disconnecting air lines entirely through integrated mechanical coupling systems.
Common Misconception
Many believe that humanoid robots are required for flexible service tasks. In practice, building a humanoid is incredibly complex and energy-inefficient. Most successful autonomous service robots use stable wheeled bases or rugged tracks, which are far simpler, cheaper, and safer to deploy.
Key Takeaways
- AMRs provide significantly higher operational flexibility than legacy, track-dependent AGVs.
- Agricultural and outdoor autonomy requires advanced ruggedization and adaptive vision systems.
- Form factor follows function—wheeled bases are preferred over complex legs for most industrial applications.
Autonomous Robots vs. Traditional Robots
To understand the business and technical value of autonomy, consider this detailed comparison against traditional robotic automation:
| Feature | Traditional Robots | Autonomous Robots |
| Human Intervention | High; requires manual programming, teaching, and frequent resetting when faults occur. | Exceptionally low; operates independently for extended shifts based on high-level goals. |
| Decision Making | Zero; strictly follows pre-defined, deterministic code paths and coordinate tables. | High; evaluates environmental data in real time to select the safest, most efficient path. |
| Adaptability | Low; minor changes to part positions or factory layouts require manual software updates. | High; instantly updates internal maps to smoothly handle shifting layouts and new obstacles. |
| Navigation | Fixed; relies on physical guides like magnetic tape, floor-embedded wires, or painted lines. | Dynamic; uses natural feature navigation via LiDAR, SLAM software, and visual tracking. |
| Learning Capability | None; performs the exact same programmed path repeatedly until manually modified. | Continuous; leverages machine learning models to steadily improve performance over time. |
| Efficiency | High in static environments; suffers major drops if unexpected disruptions halt the line. | High across variable environments; minimizes downtime by autonomously routing around issues. |
| Scalability | Costly; altering or expanding layouts requires re-engineering infrastructure. | High; new routes and digital maps can be pushed to an entire fleet instantly via software. |
Sensors Used in Autonomous Robots
An autonomous robot is only as capable as its sensory array. These core components provide the raw data required to build a reliable internal map of the world.
Cameras
Stereo cameras and RGB-D (depth) cameras provide high-density color and depth data. They allow the system to perform semantic segmentation—not just detecting a shape, but identifying it as a specific object, such as a stop sign, a pedestrian, or a piece of scrap material.
LiDAR
Light Detection and Ranging (LiDAR) sensors emit millions of rapid laser pulses per second to measure exactly how long they take to bounce back. This data allows the robot to generate a highly precise, millimeter-accurate 3D point cloud map of its surrounding space in real time.
Radar
Radio Detection and Ranging (Radar) uses radio waves to determine distance and velocity. While less spatially precise than LiDAR, Radar is vital for outdoor autonomous systems because it pierces through challenging weather conditions like dense fog, heavy rain, or airborne dust.
Ultrasonic Sensors
These affordable sensors emit high-frequency sound waves to measure proximity. They are typically used as a redundant, close-range safety layer, helping detect clear glass walls or low-lying obstacles that might fall below a primary LiDAR’s line of sight.
GPS Systems
For outdoor autonomous robots, Real-Time Kinematic (RTK) GPS provides high-precision global localization down to centimeter-level accuracy, allowing agricultural and construction units to orient themselves within sprawling geographic areas.
Inertial Measurement Units (IMUs)
IMUs combine internal gyroscopes and accelerometers to track a robot’s angular velocity and linear acceleration. This data is critical for calculating real-time balance and pitch, while also fueling dead reckoning calculations when external signals drop out.
In Simple Terms
Cameras let the robot see colors and details. LiDAR acts like an ultra-fast laser scanner that maps out shapes in the dark. Radar gives the robot superhuman vision through thick fog and dust. Ultrasonic sensors act like close-range parking sensors, while GPS provides global positioning, and the IMU acts like the inner ear to maintain balance.
Real-World Example
Autonomous lawnmowers use a combination of RTK-GPS to stay within property boundaries, a front-facing camera to avoid toys left on the grass, and ultra-sensitive IMUs to safely cut grass along steep, inclined hillsides without tipping over.
Common Misconception
Many believe that using a single high-performance sensor is enough to achieve true autonomy. In engineering practice, every single sensor has a blind spot or failure mode. Cameras struggle in blinding sunlight, while LiDAR can be tricked by dense smoke. Safe autonomy demands sensor fusion—combining multiple different sensor types so they cover for each other’s limitations.
Key Takeaways
- LiDAR provides highly accurate structural mapping but requires significant computational power to process.
- Radar is essential for maintaining outdoor operational reliability in bad weather.
- Sensor fusion combines distinct sensor streams to eliminate individual hardware vulnerabilities.
AI and Machine Learning in Autonomous Robotics
AI transforms raw mechanical hardware into an intelligent, contextual agent.
Pattern Recognition
Autonomous systems use deep neural networks to extract structural meaning from unstructured environments. This allows an autonomous sorting robot to look into a messy hopper of mixed metal parts, instantly recognize distinct bracket types, and calculate their spatial orientations for clean picking.
Object Detection
Using bounding boxes and real-time instance segmentation, robots track multiple moving objects simultaneously. This enables a warehouse AMR to monitor an approaching forklift, estimate its travel speed, and determine whether it needs to slow down or change course to avoid a collision.
Route Planning
Machine learning algorithms optimize global pathways by analyzing historical transit metrics. If a specific hallway in a hospital consistently gets congested during shift changes, the robot’s routing engine learns to proactively choose alternative paths during those specific hours.
Predictive Decision Making
Advanced autonomous systems don’t just react to what is happening now—they predict what will happen next. By analyzing motion trajectories, a delivery robot can infer whether a pedestrian is simply walking down the sidewalk or preparing to step out onto a crosswalk.
Continuous Improvement
Through fleet telematics, individual robots share edge telemetry with a centralized server. If a robot in a factory discovers an optimized method for gripping a new, strangely shaped product line, that refined control model can be instantly deployed to every other robot in the fleet.
In Simple Terms
Without AI, a robot is just a machine following a rigid script. AI gives it the ability to learn from its mistakes, recognize the difference between objects, predict where people are walking, and figure out faster, safer ways to get its job done.
Real-World Example
In automated sorting facilities, robotic arms use reinforcement learning to master the art of picking up slippery, flexible plastic shipping mailers—an object whose shape changes constantly and is notoriously difficult for traditional, rigid automation to handle.
Common Misconception
People often worry that giving robots AI means they will develop independent motivations. In reality, industrial AI is narrowly focused on optimizing specific math equations, such as maximizing grip security or finding the shortest path through a warehouse floor.
Key Takeaways
- Predictive decision-making allows robots to anticipate environmental changes before they occur.
- Fleet learning ensures that an update learned by a single unit improves the entire fleet.
- AI enables robots to handle flexible, non-rigid objects that defy traditional hard-coded programming.
Navigation and Path Planning
An autonomous mobile robot must navigate safely through spaces without human assistance. This process relies heavily on a standard algorithmic framework known as SLAM (Simultaneous Localization and Mapping).
+-----------------------------------------------------+
| START NAVIGATION |
+--------------------------+--------------------------+
|
v
+--------------------------+--------------------------+
| 1. SIMULTANEOUS SLAM |
| - Reads environmental features via LiDAR & Cameras |
| - Builds an internal map while tracking location |
+--------------------------+--------------------------+
|
v
+--------------------------+--------------------------+
| 2. GLOBAL PATH PLANNING |
| - Computes optimal static route from A to B |
| - Minimizes distance using algorithms like A* |
+--------------------------+--------------------------+
|
v
+--------------------------+--------------------------+
| 3. LOCAL OBSTACLE AVOIDANCE |
| - Scans for dynamic changes (people, equipment) |
| - Generates real-time micro-steering corrections |
+--------------------------+--------------------------+
|
v
+--------------------------+--------------------------+
| 4. REAL-TIME ADAPTATION |
| - Continuously monitors for path blockages |
| - Triggers a full global rerun if blocked |
+--------------------------+--------------------------+
|
v
+-----------------------------------------------------+
| TARGET DESTINATION REACHED |
+-----------------------------------------------------+
Mapping
Before a robot can navigate, it needs an understanding of its terrain. Using SLAM, the robot explores an unfamiliar space, records environmental features using its sensors, and constructs a highly accurate digital map of the layout.
Localization
Once a map exists, the robot must figure out exactly where it stands within that digital layout. By matching its real-time sensor scans against the stored map, the system calculates its exact coordinates, even when operating indoors where GPS signals cannot penetrate.
Obstacle Avoidance
As the robot moves along its route, it constantly checks its local surroundings. If a new obstacle appears, the local path planner generates immediate micro-steering corrections to guide the robot safely around the obstruction without stopping.
Route Optimization
Robots use advanced routing algorithms like A* (A-Star) or Dijkstra’s algorithm to determine the most efficient path from point A to point B. The software evaluates distance, floor surface quality, and known high-traffic congestion zones to choose the fastest route.
Real-Time Adaptation
If a path becomes completely blocked by a closed fire door or a stalled forklift, the robot doesn’t freeze. It marks that specific route as impassable in its local map, re-runs its global planner, and instantly switches to an alternative corridor.
In Simple Terms
Imagine being dropped into a dark, unfamiliar room with a flashlight. As you look around, you note where the walls are (Mapping), figure out your position relative to the doorway (Localization), plan a path to the light switch (Route Optimization), and step around a misplaced footstool on the floor (Obstacle Avoidance).
Real-World Example
Autonomous floor-scrubbing robots in major transit stations use SLAM navigation daily. They clean massive, open terminal floors during busy travel rushes, seamlessly steering around crowds of moving commuters and temporary baggage displays.
Common Misconception
Many believe that if a robot gets lost, you have to manually drive it back to its starting base. Modern autonomous navigation systems feature robust “relocalization” routines. If a robot’s tracking gets disrupted, it simply spins in place to scan for familiar structural landmarks and instantly reorients itself on the map.
Key Takeaways
- SLAM allows a robot to build a map of an unfamiliar space while simultaneously tracking its position within it.
- Local path planners handle immediate obstacle avoidance, while global planners calculate the overall route.
- Relocalization algorithms enable lost robots to regain their spatial bearings autonomously.
Real-World Applications of Autonomous Robots
Autonomous systems are driving digital transformation across a wide range of global sectors.
Manufacturing
- Business Challenge: Traditional fixed assembly lines struggle to handle modern high-mix, low-volume production demands, creating costly bottlenecks during product switchovers.
- Robotic Solution: Deploying fleet-controlled AMRs and collaborative robot arms that adjust their workflows dynamically based on the specific product variant arriving at the workstation.
- Benefits: Completely eliminates the downtime associated with manual retooling and assembly line reconfigurations.
- Outcomes: Facilities achieve significantly higher production flexibility, lower scrap rates, and a faster time-to-market for customized goods.
Warehousing and Logistics
- Business Challenge: The rapid growth of e-commerce has created an urgent demand for faster order sorting and fulfillment, all while warehouses face persistent labor shortages.
- Robotic Solution: Introducing autonomous sorting fleets and high-capacity inventory movers that handle product transport from receiving docks directly to shipping bays.
- Benefits: Enables highly reliable, around-the-clock sorting and order picking without human fatigue or sorting errors.
- Outcomes: Logistics hubs see a major increase in order picking accuracy, lower processing overhead, and a dramatic reduction in order fulfillment cycle times.
Healthcare
- Business Challenge: Hospital staff spend significant time on manual tasks like transporting linens, meals, and medical waste, pulling them away from direct patient care.
- Robotic Solution: Deploying specialized autonomous delivery robots equipped with secure, badge-authenticated storage lockers for transporting sensitive materials.
- Benefits: Keeps critical clinical supplies moving continuously through facilities while lowering the risk of cross-contamination.
- Outcomes: Nurses and clinical teams can focus more time on direct patient care, operational efficiency increases, and internal delivery workflows are fully digitized.
Agriculture
- Business Challenge: Modern agriculture faces mounting pressures from shrinking labor pools, changing weather patterns, and the urgent need to cut down on chemical pesticide use.
- Robotic Solution: Implementing autonomous field units that utilize high-resolution computer vision to identify weeds and eliminate them using precise mechanical micro-weeders or targeted micro-sprays.
- Benefits: Drastically reduces reliance on chemical treatments while optimizing crop yields per acre.
- Outcomes: Farming operations achieve lower chemical input costs, reduced environmental impact, and highly reliable field maintenance.
Retail
- Business Challenge: Inaccurate inventory counts, misplaced items, and phantom stockouts lead to lost revenue and friction for customers.
- Robotic Solution: Introducing tall, sensor-rich autonomous inventory robots that cruise store aisles during off-hours to scan shelf stock levels and verify pricing tags.
- Benefits: Delivers continuous, highly accurate visibility into shelf inventory without disrupting daily store operations.
- Outcomes: Retailers see a noticeable drop in stockouts, improved inventory accuracy, and more effective stock replenishment schedules.
Security and Surveillance
- Business Challenge: Patrolling expansive industrial yards, remote substations, and large commercial perimeters manually is expensive, physically demanding, and often leaves dangerous security gaps.
- Robotic Solution: Deploying rugged, all-weather autonomous security robots equipped with thermal imagery cameras, license plate readers, and anomaly detection software.
- Benefits: Provides highly reliable, continuous perimeter monitoring and instantly alerts human security centers to unusual activity.
- Outcomes: Facilities reduce their blind spots, lower security overhead costs, and improve safety by keeping human guards out of potentially dangerous situations.
Transportation
- Business Challenge: Heavy industries like mining and long-haul freight face extreme safety risks, rising fuel expenses, and a severe shortage of qualified long-distance drivers.
- Robotic Solution: Upgrading operations with heavy autonomous haul trucks and long-haul freight vehicles controlled by advanced path-planning and safety systems.
- Benefits: Maximizes fuel efficiency through optimized driving profiles and allows continuous operations without mandated rest breaks.
- Outcomes: Fleet operators see lower fuel consumption, reduced maintenance costs, and a significant drop in transportation accidents.
In Simple Terms
Autonomous robots are stepping into the gaps where work is too dull, dirty, repetitive, or dangerous for humans—whether that means carrying heavy boxes across a giant warehouse, patrolling a cold fence line at midnight, or precisely weeding fields under a hot sun.
Real-World Example
Major online retailers deploy thousands of drive units beneath mobile shelving units. Instead of a human walking miles everyday to pick individual items, the autonomous robots lift and carry the entire inventory rack directly to the stationary worker.
Common Misconception
Many believe that implementing robots in these industries instantly eliminates all human employment. In practice, companies that deploy autonomous systems typically see their business scale up, allowing them to retrain their existing staff into high-value roles like fleet managers, safety supervisors, and system maintenance technicians.
Key Takeaways
- Logistics and warehousing see the fastest return on investment from autonomous vehicle adoption.
- Autonomous tracking and surveillance significantly improve corporate security response times.
- Enterprise robotics focus heavily on eliminating repetitive tasks to let human employees tackle more strategic roles.
Benefits of Autonomous Robots
Transitioning from traditional manual workflows to integrated autonomous systems delivers concrete, measurable competitive advantages for modern enterprises.
- Increased Productivity: Autonomous systems do not experience physical fatigue, distraction, or drop-offs in performance. They maintain a precise, mathematically optimized operational pace from the first minute of a shift to the last.
- Reduced Human Error: By removing human manual data entry and repetitive physical handling from complex tasks, autonomous robots eliminate common operational mistakes like misfiled stock numbers, incorrect assembly alignments, or dropped components.
- Enhanced Safety: Autonomous systems excel at taking over dangerous tasks. Whether handling molten metals in a foundry, inspecting high-voltage power lines, or working in toxic chemical environments, they keep human workers safely out of harm’s way.
- 24/7 Operations: Autonomous systems can run continuously through nights, weekends, and holidays without requiring facility lighting, heating, or shift breaks. They only pause for scheduled preventative maintenance or quick battery hot-swaps.
- Scalability: When consumer demand spikes, expanding operations with manual labor requires slow, expensive hiring and onboarding processes. With an autonomous fleet, you can scale capacity up almost instantly by deploying additional pre-configured units onto your digital map.
- Cost Efficiency: While the initial hardware investment can be significant, the long-term operational savings are profound. Companies typically see reduced scrap rates, lower energy costs, fewer workplace injury claims, and a rapid amortization of their initial capital expenses.
Challenges of Autonomous Robotics
Despite the clear operational benefits, deploying autonomous robotics requires a balanced understanding of several real-world technical and organizational hurdles.
- Safety Concerns: Deploying heavy, powerful machinery into shared human workspaces introduces serious safety risks. Systems must feature layered, redundant safety architectures to guarantee they will stop instantly if a human steps unexpectedly into their path.
- High Initial Costs: Designing, purchasing, and integrating an advanced autonomous robot fleet requires a significant upfront investment. This capital expenditure includes the cost of rugged hardware, premium sensors, software licensing, and facility integration services.
- Ethical Considerations: The widespread adoption of autonomous systems naturally sparks discussions about workplace displacement. Organizations must proactively manage this transition, focusing on upskilling and retraining their workforce to handle higher-level strategic roles.
- Regulatory Challenges: Robotic safety regulations are evolving rapidly. Organizations must navigate complex international frameworks, such as ISO 3691-4 for driverless industrial trucks or ANSI/RIA R15.08 for mobile robots, to ensure full operational compliance.
- Technical Limitations: While modern vision and navigation systems are incredibly capable, edge cases still present challenges. Blinding reflective glare, slick wet floors, or highly dynamic environments can still push sensors and path-planning software to their limits.
- Cybersecurity Risks: Because autonomous robots connect to internal enterprise networks for telemetry and fleet coordination, they represent potential targets for digital threats. Implementing strict device authentication, encrypted data lines, and secure edge configurations is mandatory.
In Simple Terms
The major advantages of autonomous robots are that they work non-stop, don’t make mistakes, and take on dangerous jobs. The trade-offs are that they require a substantial upfront investment, demand strict network security, and require companies to carefully plan how their human teams and new robotic fleets will work together.
Real-World Example
A manufacturing plant deployed an autonomous forklift fleet. While they saw a major boost in throughput, they initially struggled when glare from a large skylight temporarily blinded the forklifts’ primary cameras at noon every day. They solved the issue by adding a secondary radar sensor layer, highlighting the need for robust, multi-sensor designs.
Common Misconception
Many business owners believe that once an autonomous robot is unboxed, it works perfectly with zero ongoing attention. In reality, these are sophisticated engineering platforms that require structured software lifecycle management, regular sensor calibration, and consistent preventative maintenance.
Key Takeaways
- Autonomous systems maximize operational uptime by running continuous shifts without breaks.
- Layered, multi-sensor setups are required to handle tricky edge cases like changing lighting conditions.
- Robust cybersecurity protocols are essential for protecting networked robotic fleets from external vulnerabilities.
Common Misconceptions About Autonomous Robots
To successfully integrate autonomous systems into business operations, it is critical to separate popular science fiction tropes from real-world engineering realities.
Robots Do Not Think Like Humans
Modern AI systems operate through advanced pattern recognition and complex statistical inference—they do not possess consciousness, emotional empathy, or generalized common sense. A robot doesn’t “know” what a cardboard box is in the human sense; it simply processes a geometric bounding box array that its path planner must steer around.
Autonomy Does Not Mean Total Independence
An autonomous robot can navigate a facility and execute tasks independently, but it remains strictly bound to an overarching software infrastructure. It relies on human engineers for high-level goal assignment, fleet management routing, preventative maintenance, and core software updates.
Robots Are Not Replacing Every Job
The goal of modern industrial autonomy is task automation, not total human displacement. Robots excel at repetitive, predictable tasks that humans find physically exhausting or mundane. This shift allows human workers to pivot toward roles requiring creative problem-solving, emotional intelligence, and complex systems management.
AI Is Not Magic
AI models are entirely dependent on the quality of the training data they receive. If a model is trained on flawed data, or deployed into an environment wildly different from its training scenarios, its performance will degrade. True autonomy relies on clean data engineering and rigorous real-world testing.
Autonomous Robots in Industry 4.0
Autonomous robots serve as a foundation of the Industry 4.0 paradigm, driving the creation of fully connected smart factories and decentralized supply chains.
Smart Factories
In a classic manufacturing facility, production machines are bolted to the floor in fixed rows. Industry 4.0 smart factories break this rigid structure by using autonomous mobile fleets to dynamically ferry materials between modular, reconfigurable workstations based on real-time order demands.
Connected Systems
Modern autonomous robots do not operate as isolated mechanical units. They connect directly to enterprise software systems, including Manufacturing Execution Systems (MES) and Warehouse Management Systems (WMS), allowing them to automatically adjust their travel speeds and priorities based on real-time fulfillment data.
Predictive Maintenance
Equipped with hundreds of internal diagnostic sensors, autonomous fleets continuously monitor their own structural health. They track micro-vibrations in wheel bearings, thermal changes in motor controllers, and battery cycle degradation, flagging components for preventative maintenance before an actual breakdown occurs.
Industrial Automation
The integration of autonomy transforms industrial automation from a rigid, capital-intensive layout process into an agile, software-defined infrastructure. This agility allows factories to rapidly pivot production lines to manufacture entirely new product variants without re-engineering their physical shop floors.
Digital Transformation
Deploying autonomous systems accelerates an enterprise’s broader digital transformation. Every movement, pick, and scan executed by an autonomous fleet generates valuable operational data, providing management teams with a crystal-clear, real-time look into their entire operational pipeline.
In Simple Terms
Industry 4.0 means building a factory where every machine, conveyor belt, and robot talks to one another. Instead of a rigid assembly line, autonomous robots act like an intelligent, flexible delivery network that automatically moves parts to exactly where they are needed next.
Real-World Example
In modern automotive facilities, car chassis are no longer moved on long, overhead conveyor chains. Instead, they sit on top of heavy-duty autonomous mobile platforms that independently transport the car from one assembly cell to the next, adjusting their paths based on the specific trim options ordered for that vehicle.
Common Misconception
Many assume that building a smart factory requires replacing every existing machine with a brand-new robotic system. In reality, most deployments focus on retrofitting existing facilities by introducing autonomous mobile fleets to handle the transit logistics between older, reliable production machinery.
Key Takeaways
- Industry 4.0 replaces rigid, fixed conveyor lines with flexible, software-defined mobile fleets.
- Predictive maintenance logging allows robots to request service before a mechanical failure disrupts operations.
- Continuous operational telemetry provides leadership teams with real-time visibility into workflow bottlenecks.
Career Opportunities in Robotics
The global expansion of autonomous technology has triggered a massive wave of recruitment across engineering, software development, and strategic operational consulting.
Robotics Engineer
- Core Responsibilities: Designing and assembling physical robotic platforms, specifying actuator torque profiles, selecting sensor arrays, and building rugged mechanical structures.
- Key Skills Required: Mastery of Computer-Aided Design (CAD) software, finite element analysis (FEA), kinematics, and advanced material dynamics.
Autonomous Systems Engineer
- Core Responsibilities: Developing and optimizing the core navigation, state estimation, and path-planning software stacks that allow vehicles to move independently.
- Key Skills Required: Deep expertise in SLAM algorithms, sensor fusion protocols, Kalman filtering, and production-grade C++ or Python development.
AI Robotics Specialist
- Core Responsibilities: Designing, training, and deploying deep learning models for computer vision, object classification, and robotic manipulation tasks.
- Key Skills Required: Extensive experience with machine learning frameworks like PyTorch or TensorFlow, convolutional neural networks (CNNs), and visual transformers.
Robotics Software Developer
- Core Responsibilities: Writing clean, modular backend code to manage low-level hardware abstraction layers, message passing, and multi-threaded device drivers.
- Key Skills Required: Mastery of ROS / ROS 2 environments, Linux systems administration, real-time operating systems (RTOS), and git version control.
Automation Consultant
- Core Responsibilities: Partnering with enterprise clients to analyze their manual workflows, calculate return on investment (ROI) metrics, and design customized robotic deployment strategies.
- Key Skills Required: Strong business acumen, deep knowledge of industrial safety regulations, systems integration oversight, and change management leadership.
Skills Required to Work with Autonomous Robots
To successfully transition into the autonomous systems sector, engineering professionals must master a specific multidisciplinary roadmap.
+---------------------------------------+
| AUTONOMOUS ROBOTICS ROADMAP |
+-------------------+-------------------+
|
+----------------------------+----------------------------+
| | |
v v v
+------------------+ +------------------+ +------------------+
| 1. CORE CODING | | 2. ROBOTICS AI | | 3. HARDWARE & HW |
| - Modern C++ | | - Deep Learning | | - ROS 2 Systems |
| - Production | | - PyTorch/TF | | - Sensor Fusion |
| Python | | - Computer | | - Microcon- |
| - Linux Systems | | Vision | | trollers |
+------------------+ +------------------+ +------------------+
Programming
Production-grade robotics software demands high-performance, predictable execution. Aspiring developers must master modern C++ for latency-critical tasks like sensor processing and motor control, alongside Python for rapid prototyping, data analysis, and machine learning model development.
AI and Machine Learning
Professionals need a deep theoretical and practical understanding of neural network architectures, regression analysis, reinforcement learning paradigms, and data normalization techniques to effectively build cognitive machine capabilities.
Sensor Technologies
Engineers must understand the physics behind data acquisition. This knowledge includes mastering how to configure, calibrate, and filter data from LiDAR arrays, cameras, ultrasonic sensors, and inertial measurement platforms.
Computer Vision
Developing autonomous systems requires expertise in processing visual data. Key competencies include real-time point cloud manipulation, camera calibration matrix configurations, object detection tracking, and semantic scene segmentation.
Embedded Systems
Robots are physical edge hardware platforms. Engineers must be comfortable working with microcontrollers (such as ARM-based chips), managing real-time operating systems (RTOS), debugging hardware communication buses (like CAN, I2C, and SPI), and optimizing code to fit within strict memory and power constraints.
Control Systems
Bridging the gap between software paths and physical motion requires solid control theory. This includes mastery of feedback loops, PID tuning, state-space representations, and kinematic modeling to ensure smooth, stable robotic movement.
In Simple Terms
Working in robotics means combining multiple engineering fields. You need to write clean code (Programming), help the machine understand its surroundings (AI and Computer Vision), know how to wire up hardware and sensors (Embedded Systems), and master the math that makes motors turn smoothly (Control Systems).
Real-World Example
A software developer transitioning into robotics might spend their first month using ROS 2 to link a new LiDAR sensor to an embedded computer, ensuring that coordinate data transforms accurately into the robot’s navigation software without crashing the system.
Common Misconception
Many assume that entering the robotics industry requires a PhD in advanced mathematics. While research roles certainly demand deep academic backgrounds, the vast majority of open commercial positions value practical engineering skills, such as writing reliable code, setting up ROS 2 pipelines, and troubleshooting embedded hardware.
Key Takeaways
- Modern C++ is required for low-latency code, while Python is the standard for AI model training.
- ROS 2 serves as the essential middleware framework for modern commercial robotics production.
- Embedded systems mastery bridges abstract navigation software with physical mechanical actuators.
Best Practices for Implementing Autonomous Robots
Deploying an autonomous robot fleet successfully requires moving through a structured, risk-mitigated integration process.
Start with Clear Objectives
Avoid implementing technology simply for its own sake. Begin by clearly defining the specific business challenge you want to solve—whether that is increasing sorting speed by 25% or reducing manual material handling errors—and establish clear benchmarks to measure success.
Focus on Safety
Design your deployment with safety as the foundational layer. Walk your facility floor, identify potential traffic conflict zones, implement clear physical signage, and ensure all robots are configured with conservative safety fields and physical emergency stop buttons.
Test in Controlled Environments
Never deploy a brand-new robotic fleet directly into a hectic, high-speed production line. Set up a dedicated, isolated testing area to validate your maps, test obstacle avoidance capabilities, and refine your fleet management routing before opening up full facility access.
Monitor Performance
Leverage integrated fleet management dashboards to closely track key performance indicators (KPIs). Monitor metrics like average mission completion times, unexpected obstacle stoppage frequencies, and battery charging efficiency to quickly spot underperforming units.
Continuously Improve Systems
Treat your autonomous deployment as an evolving infrastructure. Regularly review your operational data to optimize travel paths, push software updates to improve sensor performance, and gather continuous feedback from your human teams to refine how humans and robots interact.
Future of Autonomous Robotics
The next decade will bring profound advancements in how machines perceive, reason, and collaborate within human environments.
Collaborative Robots (Cobots)
The next generation of industrial arms will step out from behind safety cages entirely. Advanced force-torque sensors and cognitive vision layers will allow cobots to work directly alongside human technicians, automatically slowing down or altering their movements based on subtle human gestures and real-world proximity.
Swarm Robotics
Inspired by the collective behavior of social insects, swarm robotics involves deploying large groups of simple, affordable robots that communicate locally with one another. These swarms work together to solve complex tasks collectively, like rapidly mapping a disaster site or sorting thousands of packages simultaneously without relying on a single, vulnerable central server.
AI-Powered Decision Systems
The integration of multi-modal Vision-Language-Action (VLA) models will allow future robots to shift from executing strict programmatic instructions to understanding high-level missions. Instead of coding every turn, an engineer will simply issue a natural command like “inspect the facility for air leaks,” and the robot will independently infer the context, plan its route, and carry out the task.
Humanoid Robots
As advancements in high-density batteries, compact electric actuators, and balance algorithms accelerate, humanoid platforms are moving from experimental research labs onto real-world factory floors. Their main advantage is their ability to fit seamlessly into existing infrastructure designed for humans, allowing them to navigate tight spaces, climb stairs, and use standard hand tools without requiring facilities to undergo expensive renovations.
Fully Autonomous Operations
We are moving toward fully autonomous ecosystems where manufacturing plants, fulfillment centers, and agricultural farms manage entire lifecycles with minimal human intervention. In these facilities, teams of diverse, interconnected robots will cooperate to handle production, logistics, quality control, and even self-maintenance routines automatically.
In Simple Terms
The future of robotics isn’t about isolated, blind machines inside cages. It’s about smart, collaborative systems that work right alongside you, communication networks where hundreds of small drones work as a team, and humanoid machines that can step directly into human environments to tackle demanding, repetitive tasks.
Real-World Example
Major logistics enterprises are currently piloting humanoid platforms to lift and stack heavy boxes in trailers where traditional, wheeled mobile platforms cannot easily maneuver, showcasing how human form factors can solve complex logistics edge cases.
Common Misconception
Many believe that humanoid robots will instantly replace all wheeled mobile platforms. In reality, wheels remain vastly superior in speed, payload capacity, and energy efficiency on flat surfaces. Humanoids will serve as specialized assets for navigating complex, multi-level environments built explicitly for human access.
Key Takeaways
- VLA models will allow future robots to understand and execute natural language missions.
- Swarm robotics provides unmatched reliability by eliminating single points of failure in fleet operations.
- Humanoid platforms provide value by fitting directly into existing, unmodifiable human workspaces.
Case Study Section
Case Study 1: Warehouse Automation Project
- Problem: A high-growth e-commerce fulfillment center faced a severe 40% labor shortage during peak holiday seasons, resulting in massive shipping delays, elevated order mispicking rates, and extreme worker fatigue.
- Robotic Solution: The facility deployed a fleet of 35 Autonomous Mobile Robots (AMRs) to handle material transport, linking them directly to their existing Warehouse Management System (WMS).
- Implementation Process: The deployment team spent one week scanning the facility using SLAM to generate a digital map, established dedicated AMR travel lanes, set up automated opportunity-charging stations, and trained the picking staff on safe human-robot interaction protocols.
- Outcomes: Order picking throughput surged by 150%, mispick errors dropped to near zero, and the facility maintained full operational capacity during peak periods without requiring mandatory overtime from staff.
- Lessons Learned: Ensuring your facility’s Wi-Fi network is robust and stable across the entire floor is critical; early data dropouts during initial testing highlighted the need for seamless network roaming configurations.
Case Study 2: Hospital Delivery Robot Deployment
- Problem: A multi-building healthcare campus struggled with clinical staff spending hours every shift walking miles to fetch linens, meals, and laboratory specimens, pulling them away from patient care.
- Robotic Solution: The hospital introduced 8 autonomous mobile service robots equipped with secure, badge-authenticated storage compartments to handle automated internal deliveries.
- Implementation Process: The deployment team integrated the robots with the building’s smart elevator systems via secure Wi-Fi relays, mapped out all public corridors, and programmed the units to use polite audio alerts and slow speeds when operating in high-traffic patient zones.
- Outcomes: The delivery fleet successfully automated over 800 miles of manual transport every month, returning thousands of hours of valuable time back to nursing staff and streamlining lab sample delivery times.
- Lessons Learned: Gathering early input and buy-in from clinical staff is essential; adding simple, intuitive touchscreen menus onto the robots made it incredibly easy for busy hospital personnel to quickly adopt the new system.
Case Study 3: Smart Agriculture Robot System
- Problem: A commercial organic vineyard faced soaring manual weeding labor costs and wanted to eliminate chemical herbicide use while maintaining reliable weed control across 200 acres of uneven hillside terrain.
- Robotic Solution: The vineyard deployed 4 rugged, all-weather autonomous weeding robots equipped with multispectral camera arrays, AI vision systems, and mechanical micro-cultivators.
- Implementation Process: The implementation team mapped out the vineyard rows using RTK-GPS coordinates, configured the robots’ vision models to reliably distinguish grapevine trunks from weeds, and established secure outdoor charging docks.
- Outcomes: The autonomous system maintained continuous, around-the-clock weed control, slashing manual weeding labor expenses by 70% and completely eliminating the need for chemical inputs.
- Lessons Learned: Outdoor environments demand extreme physical ruggedization; upgrading the robots’ camera housings with automatic lens-cleaning wipers was necessary to handle fine field dust and morning mud splatters.
FAQ Section
1. What are autonomous robots?
Autonomous robots are advanced machines capable of performing tasks, navigating environments, and making operational decisions independently without requiring continuous human control or fixed tracks.
2. How do autonomous robots work?
They operate via a continuous feedback loop: on-board sensors gather environmental data (Perception), internal software processes that data to build maps and plan paths (Decision-Making), and motor controllers drive the physical hardware to execute actions safely (Action Execution).
3. What technologies power autonomous robots?
Autonomy is driven by a combination of Artificial Intelligence (AI), machine learning algorithms, computer vision models, advanced sensor hardware (LiDAR, cameras, radar), specialized middleware like ROS 2, and high-performance edge computing platforms.
4. Are autonomous robots powered by AI?
Yes, modern autonomous robots rely heavily on AI and machine learning to interpret complex sensor data, recognize objects, navigate around dynamic obstacles, and make safe operational decisions in unmapped environments.
5. What industries use autonomous robots?
Autonomous robots are widely deployed across manufacturing, warehousing and logistics, healthcare facilities, commercial agriculture, retail operations, security monitoring, and long-haul transportation networks.
6. Can autonomous robots learn?
Yes, through machine learning frameworks and fleet telematics, robots can analyze data from real-world operations to steadily improve their grip configurations, path planning paths, and obstacle avoidance maneuvers over time.
7. What sensors do autonomous robots use?
They utilize a diverse sensor stack including LiDAR for 3D mapping, cameras for visual recognition, Radar for weather-resistant velocity tracking, ultrasonic sensors for close-range detection, GPS for outdoor localization, and IMUs for internal balance tracking.
8. Are autonomous robots safe?
Yes, modern autonomous robots are engineered with strict, multi-layered safety systems, including redundant proximity sensors, active obstacle-avoidance software, and physical emergency stop switches to guarantee they stop instantly near humans.
9. What careers exist in robotics?
The industry offers extensive opportunities for Robotics Engineers, Autonomous Systems Engineers, AI Robotics Specialists, Robotics Software Developers, and Automation Integration Consultants.
10. What is the future of autonomous robotics?
The future centers on collaborative cobots that work closely with humans, swarm robotics for distributed tasks, advanced VLA models for natural language control, and humanoid platforms designed for unmodifiable spaces.
11. What is the difference between automated and autonomous robots?
Automated robots follow rigid, pre-programmed instructions along fixed tracks and cannot handle changes. Autonomous robots use real-time sensor loops to adapt, steer around unexpected obstacles, and make independent routing decisions.
12. What software do autonomous robots use?
The industry standard framework is the Robot Operating System (ROS / ROS 2), which provides crucial device drivers, hardware abstraction layers, message-passing capabilities, and advanced navigation libraries.
13. What is SLAM in robotics navigation?
SLAM stands for Simultaneous Localization and Mapping. It is an algorithmic framework that allows a mobile robot to map out an completely unfamiliar environment while simultaneously tracking its own position within that map.
14. What is edge computing in robotics?
Edge computing refers to processing sensor data and running AI models locally on the robot’s physical computing hardware, eliminating cloud network latency to ensure split-second safety and braking actions.
15. How do you implement autonomous robots in a business?
Successful deployment requires defining clear operational goals, auditing facility layouts, conducting extensive testing in controlled zones, establishing redundant safety fields, and continuously monitoring performance using fleet dashboards.
Final Summary
The transition from traditional, rigid automation to cognitive autonomous systems marks a defining milestone in modern engineering and industrial operations. By combining advanced sensor stacks and edge computing with Physical AI and robust navigation frameworks like SLAM, autonomous robots have evolved from stationary factory arms into flexible, adaptive systems capable of navigating the complexities of human-centric environments.
While implementing these platforms requires careful navigation around initial capital expenses, evolving safety regulations, and strict network security standards, the long-term enterprise benefits—including massive productivity gains, enhanced workplace safety, and unmatched operational scalability—are reshuffling the competitive landscape across every major global sector.