Introduction
Modern manufacturing is moving faster than ever before. To keep up with global demand, factories have shifted away from repetitive manual tasks. Instead, they rely heavily on industrial automation to maintain speed, quality, and efficiency. They take over hazardous duties, protect human workers from injury, and deliver flawless performance shift after shift. Whether you are an engineering student, a factory professional, or a tech enthusiast, understanding how these systems move is a massive career advantage. As a foundational learning platform, RobotsOps.com provides the insights you need to navigate this changing technological landscape. This article will break down the essential components, step-by-step working principles, and core deployment strategies that define modern robotics.
What Is a Robotic Arm?
A robotic arm is a programmable mechanical manipulator designed to perform specific tasks by moving parts, tools, or specialized devices through a defined space. It acts as an interconnected physical chain that mimics the anatomy of a human shoulder, elbow, and wrist.
Historically, the journey of industrial robotic arms began in the mid-twentieth century with the development of the Unimate, the first industrial robot deployed on a General Motors assembly line. Its primary job was simple: lifting hot pieces of die-cast metal and stacking them.
Today, robotic arms have evolved from heavy, rigid machinery into highly intelligent systems. Equipped with advanced computing power and real-time sensory tracking, they form the backbone of modern smart factories, electronics assembly plants, and automated logistics hubs worldwide.
Main Components of a Robotic Arm
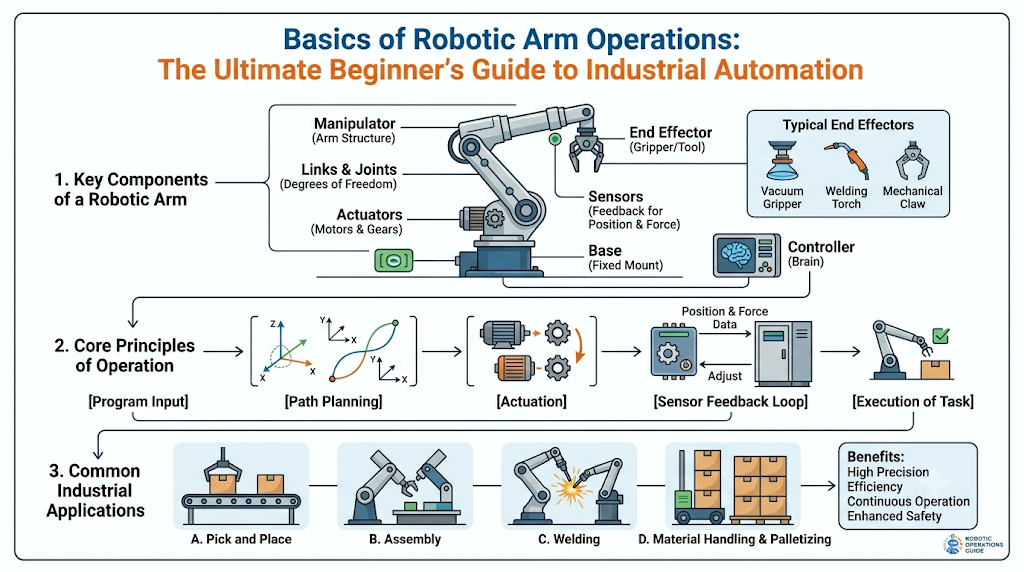
To understand how a robotic arm functions, you must first look at its structural anatomy. Every arm relies on a precise combination of structural members, power units, and control software.
+-------------------------------------------------------------+
| CONTROLLER |
| (The Brain: Processes code, sensor data, and movement) |
+-------------------------------------------------------------+
|
v
+-------------------------------------------------------------+
| ACTUATORS |
| (The Muscles: Servos & motors providing mechanical power) |
+-------------------------------------------------------------+
|
v
+-------------------------------------------------------------+
| PHYSICAL STRUCTURE |
| [Base] ---> [Joints & Links] ---> [Sensors] ---> [End Effector]
| (Anchor) (Pivot/Bones) (Feedback) (The Hand) |
+-------------------------------------------------------------+
Base
The base is the stationary or track-mounted anchor that supports the entire weight of the robot. It absorbs the structural forces generated during rapid acceleration and deceleration. For example, a heavy automotive welding robot requires a thick steel base bolted deep into the concrete floor to prevent tipping during fast maneuvers.
Joints
Joints are the pivot points that allow relative motion between rigid parts of the arm. Similar to the human elbow or wrist, joints define how many ways a robot can bend and turn. Each independent axis of motion is referred to as a degree of freedom (DoF).
Links
Links are the rigid structural segments that connect the joints together. You can think of links as the bones of the robot arm. They are typically engineered from high-strength aluminum or carbon fiber to minimize weight while maximizing load-bearing capacity.
End Effector
The end effector is the tool attached to the very end of the robotic arm, acting as the robot’s hand. Its configuration changes entirely depending on the application. Common examples include mechanical claws for packing boxes, vacuum suction cups for handling glass sheets, and welding torches for fusing sheet metal.
Actuators
Actuators are the muscles of the system. They convert electrical, pneumatic, or hydraulic energy into physical motion. Most precise industrial arms use electric servo motors combined with specialized gearboxes to execute smooth, micrometric positional changes.
Sensors
Sensors provide the robot with awareness of its internal state and surrounding environment. Encoders track exact rotational positions, force-torque sensors monitor physical resistance during assembly, and 2D/3D vision cameras allow the arm to detect, identify, and locate objects dynamically.
Controller
The controller is the central brain of the robotic system. It houses the computer processor, safety circuits, and motor drives. The controller reads user programs, processes incoming sensor signals, and coordinates the electricity sent to each actuator to execute a specific path.
Basics of Robotic Arm Operations
Operating a robotic arm requires a continuous, real-world loop of calculation, execution, and verification. The operational cycle can be broken down into six essential stages:
+---------------------+ +---------------------+ +---------------------+
| 1. Receive Commands | ---> | 2. Motion Planning | ---> | 3. Joint Movement |
+---------------------+ +---------------------+ +---------------------+
|
v
+---------------------+ +---------------------+ +---------------------+
| 6. Continuous Mon. | <--- | 5. Sensor Feedback | <--- | 4. End-Effector Ctrl|
+---------------------+ +---------------------+ +---------------------+
1. Receiving Commands
The operation starts when the controller reads a set of instructions. This can come from a pre-written script, a human operator steering the unit with a teach pendant, or a vision system delivering coordinate data over a factory network.
2. Motion Planning
Before a single motor turns, the controller runs mathematical models to plan the path. It calculates the fastest, safest trajectory from Point A to Point B while ensuring the arm avoids internal collisions, respects acceleration limits, and stays within its physical envelope.
3. Joint Movement
Once the path is calculated, the controller sends regulated electrical currents to the actuators. The motors spin, driving the gearboxes at the joints. As the joints rotate or slide, the attached rigid links sweep through space, carrying the tool toward the destination.
4. End-Effector Control
When the arm reaches the designated position, the controller triggers the end effector. For example, in a packaging line, the arm hovers over a cardboard box, and a signal fires to activate a vacuum valve, sealing suction cups against the box surface to lift it.
5. Sensor Feedback
While the arm is moving, optical encoders inside the joints constantly track the rotational angles. They send this positioning data back to the controller hundreds of times per second. If external resistance or an obstruction forces the arm off-course, the controller instantly catches the variance.
6. Continuous Operation and Monitoring
The controller continually compares the actual position of the arm against the programmed path. It adjusts motor torque on the fly to correct deviations. Once a task finishes, the system immediately pulls the next command line, maintaining an uninterrupted production loop.
RobotsOps.com Guide to Robotic Arm Operations
Developing foundational robotics skills requires a balanced approach that combines theoretical engineering principles with hands-on practice. This specialized guide highlights the critical focus areas necessary for mastering modern automation systems.
Understanding Robot Motion
To control an arm, you must understand how it navigates space. This involves two spatial systems: Forward Kinematics and Inverse Kinematics. Forward kinematics calculates where the end effector will end up based on known joint angles. Inverse kinematics works backward; you define the target spatial coordinate, and the system calculates the exact joint configurations required to get there.
Learning Robot Programming Basics
Programming an arm can take many forms depending on the environment. For straightforward, highly repetitive tasks, operators use a handheld teach pendant to manually guide the arm to key locations and save those points. For complex setups, engineers use offline programming software to simulate paths, check for collisions, and write code without stopping actual factory production.
Improving Operational Accuracy
Real-world accuracy depends on careful calibration and consideration of payload constraints. Operating an arm past its recommended weight rating can cause structural deflection, motor strain, and path errors. Proper tool center point (TCP) calibration ensures that the controller knows the exact physical tip of the tool, allowing for precise tracking during complex angles.
Building Safe Automation Systems
Safety is paramount when working with heavy machinery. Engineers use safety zones, light curtains, and pressure-sensitive mats to immediately cut power if a person walks into the active work envelope. Modern collaborative systems also feature built-in torque limits that stop all motion immediately if a soft human collision is detected.
Preparing for Advanced Robotics Projects
Once you master basic pick-and-place routines, you can step into advanced integration. This includes setting up dynamic vision systems so robots can sort random parts on a moving conveyor belt, or linking multiple arms together via a centralized programmable logic controller (PLC) for complex multi-stage assemblies.
Types of Robotic Arms
Different automation tasks require different physical architectures. Choosing the right design depends entirely on the speed, space, and payload requirements of your project.
Cartesian Robots
Cartesian robots, often called gantry robots, feature three linear joints that move along straight lines matching the X, Y, and Z axes. They are highly rigid, simple to program, and excellent for top-down tasks like CNC milling, 3D printing, or moving heavy crates across a sprawling warehouse floor.
SCARA Robots
SCARA stands for Selective Compliance Assembly Robot Arm. These units feature a parallel joint layout that makes them rigid vertically but flexible horizontally. This unique arrangement allows them to perform incredibly fast, precise insertion tasks, making them the industry favorite for high-speed pick-and-place electronics assembly.
Articulated Robots
Articulated robots are designed to mimic a human arm, usually featuring between four and six rotary joints. This architecture allows them to reach backward, twist around obstacles, and approach parts from virtually any angle. They are highly versatile and widely deployed for industrial spray painting, arc welding, and material handling.
Delta Robots
Delta robots consist of three parallel arms linked to a single base overhead, meeting at a central tool plate at the bottom. The heavy motors are mounted stationary on the top frame, allowing the thin lower linkages to move at lightning speeds. You will typically find them in food packaging and pharmaceutical lines, sorting items off fast-moving conveyors.
Cylindrical Robots
Cylindrical robots feature at least one rotary joint at the base and two linear joints to control height and extension. This creates a round, cylindrical working space. While less common in general manufacturing today, they remain widely used for handling silicon wafers inside compact semiconductor fabrication machines.
Collaborative Robots (Cobots)
Collaborative robots, or cobots, are designed with rounded profiles, enclosed joints, and highly sensitive force sensors. Unlike traditional industrial arms that must operate behind safety fences, cobots can work directly alongside human operators, taking over tedious tasks without risking worker safety.
Real-World Applications
Robotic arms have moved far beyond heavy manufacturing. Today, their adaptability makes them incredibly useful across a wide range of industries.
- Manufacturing: Arms carry out structural metal cutting, parts deburring, and detailed surface polishing with total consistency.
- Automotive Industry: Heavy-duty arms spot-weld body panels, apply uniform clear coats, and lift heavy engine blocks directly into chassis frames.
- Electronics Assembly: Precision systems pick tiny surface-mount components and solder them onto circuit boards without damaging delicate traces.
- Healthcare: Specialized high-precision arms assist surgeons by steadying tools down to sub-millimeter scales, and automate high-volume fluid sampling in labs.
- Warehousing and Logistics: Automated arms sort packages by reading barcodes, build stable pallets for shipping, and pick online orders out of bins.
- Food Processing: Washdown-rated arms slice meats cleanly, arrange delicate baked goods into blister packs, and palletize heavy beverage crates safely.
Manual Operations vs. Robotic Arm Operations
To justify upgrading from human labor to automation, companies look closely at structural performance metrics. The following table highlights how automated operations compare directly to traditional manual methods.
| Feature | Manual Operations | Robotic Arm Operations |
| Accuracy | Operator dependent; drops with fatigue | Highly precise; holds microscopic tolerances |
| Speed | Variable; limited by human physical capacity | Consistent; runs safely at high velocities |
| Productivity | Moderate; restricted by shifts and breaks | High; runs continuously day and night |
| Safety | Higher human exposure to workplace hazards | Reduced workplace risk; keeps humans away from danger |
| Repeatability | Limited; manual variance creeps in over time | Excellent; matches the exact path every cycle |
Benefits of Robotic Arm Operations
Integrating a robotic arm into a production workflow brings clear, long-term operational advantages:
Improved Productivity
Unlike human workers, robotic arms do not require rest breaks, shift handovers, or vacations. They run at optimal cycle speeds all day and night, allowing factories to reliably scale up their daily output.
Greater Precision
Top-tier industrial arms can repeat the exact same movement down to fractions of a millimeter. This extreme precision eliminates human variance, which is vital when manufacturing parts like aircraft components or medical devices.
Enhanced Workplace Safety
By stepping into toxic, hot, or physically straining environments, robotic arms drastically reduce workplace injuries. Humans can move out of harm’s way, leaving dangerous tasks like structural welding, chemical handling, and heavy lifting to machinery.
Reduced Human Error
Even the most skilled operators can make a mistake due to fatigue or distraction. A programmed robotic arm carries out its instructions perfectly every single time, drastically reducing scrap material and product reworks.
Consistent Product Quality
Because every cut, weld, or assembly step is done identically, product quality remains perfectly uniform. Customers receive a highly reliable product, protecting the brand’s reputation and lowering warranty claims.
Scalability for Industrial Automation
As market demands pivot, an automated system can be quickly updated. By changing the end-effector tool and uploading a new software routine, a robot arm can switch from sorting small parts to packing boxes without needing expensive structural overhauls.
Common Challenges
While the benefits are clear, implementing automated arms comes with unique engineering and operational challenges that teams must manage.
Calibration Errors
Over long operational runs, mechanical wear and vibrations can cause subtle physical shifts, leading to position errors.
Solution: Integrate regular, automated calibration routines using optical alignment tools or laser trackers to keep the tool center point perfectly aligned with the controller’s map.
Limited Workspace
An arm can only reach items within its physical sphere of motion, which limits its flexibility if the factory floor layout changes.
Solution: Install the robotic arm on a linear track system or an overhead gantry to extend its reach, turning a fixed workspace into a highly adaptable multi-station layout.
Sensor Failures
Dust, oil mist, and bright factory lighting can blind optical vision sensors or cause proximity switches to fail, bringing production to a halt.
Solution: Use rugged, sealed sensors rated for industrial environments, and schedule regular cleanings to keep lenses and receiver faces clear of debris.
Maintenance Requirements
The high-speed mechanical gearboxes, bearings, and cable harnesses wear out over time under continuous use.
Solution: Build a strict preventative maintenance schedule that tracks runtime hours, monitors gear grease quality, and replaces high-flex cables before they break.
Programming Complexity
Writing logic for complex, multi-axis paths requires specialized training, making fast product changeovers difficult for basic operators.
Solution: Invest in intuitive offline simulation software and modern, low-code graphical interfaces so floor technicians can adjust paths without deep programming experience.
Best Practices
To keep a robotic arm operating safely and efficiently over its lifespan, integration teams should follow these five core principles:
- Perform routine maintenance: Check fluid levels, tighten structural bolts, and listen for unusual gearbox noises during every shift change.
- Regularly calibrate robotic systems: Re-verify the tool center point alignment weekly to prevent gradual path drifting and maintain assembly quality.
- Use appropriate end effectors: Always match the gripper or tool directly to the payload’s weight, material properties, and geometry to prevent part slippage.
- Monitor sensor performance: Track error logs from encoders and vision systems early to catch failing components before they cause an unexpected line shutdown.
- Follow industrial safety standards: Always install proper physical fencing, light curtains, and clearly marked emergency stop buttons around the active workspace.
Career Opportunities
The rapid expansion of automated factories has created a massive global demand for skilled professionals who know how to design, program, and maintain these advanced systems.
Robotics Engineer
Robotics engineers design physical arm structures, build complex kinematic control software, and integrate advanced vision systems into new automated machinery.
Automation Engineer
Automation engineers focus on the bigger picture. They connect robotic arms with factory-wide PLCs, conveyors, safety networks, and enterprise tracking databases to build smooth production lines.
Mechatronics Engineer
Mechatronics engineers work at the intersection of mechanics, electronics, and computing. They design the custom wiring, circuit boards, and motor-drive systems that power modern manipulators.
Industrial Robotics Technician
Technicians work directly on the factory floor. They perform daily calibrations, run preventative maintenance routines, fix mechanical issues, and teach new paths using handheld pendants.
Control Systems Engineer
Control systems engineers specialize in feedback loop math and motor tuning. They ensure that actuators accelerate smoothly, settle quickly without shaking, and respond instantly to sensor inputs.
Manufacturing Automation Specialist
These specialists analyze traditional manual production lines to determine where robots can add the most value, calculate return on investment, and oversee the installation of new automation systems.
Future of Robotic Arm Operations
The world of robotics is changing rapidly. As modern technology advances, industrial arms are becoming smarter, more adaptable, and increasingly independent.
AI-Powered Robotics
Instead of following fixed, pre-programmed paths, future robotic arms will use machine learning to adapt to changes on the fly. They will be able to pick up randomly piled objects, self-correct path errors, and learn how to handle unfamiliar items entirely on their own.
Collaborative Robotics
The line between human spaces and machine spaces is disappearing. Next-generation cobots will feature highly advanced skin sensors and predictive vision, allowing them to work safely alongside humans without rigid safety cages.
Vision-Guided Robots
Advanced 3D cameras and real-time image processing allow arms to see their surroundings clearly. This clarity lets them inspect parts for microscopic flaws while moving them, track moving parts on a conveyor belt, and assemble highly complex products without needing expensive custom fixtures.
Autonomous Manufacturing
Smart factories are moving toward decentralized systems. Here, robotic arms will talk directly with autonomous mobile robots (AMRs) to request parts, hand off finished products, and change their own tool attachments without any human intervention.
Smart Factory Integration
Through cloud connectivity and Internet of Things (IoT) sensors, robotic arms will stream performance data continuously. Cloud-based software will monitor component temperatures and vibrations, predicting mechanical failures weeks before they happen so maintenance can be scheduled during planned downtime.
Common Misconceptions
There are several common myths surrounding industrial automation that often lead to confusion about how robotic arms actually fit into the modern workplace.
Robotic Arms Replace Every Human Worker
While arms take over highly repetitive and dangerous tasks, they do not eliminate the need for people. Instead, they shift human roles toward higher-value positions like system programming, mechanical maintenance, data analysis, and quality management.
All Robotic Arms Perform the Same Tasks
Robotic arms are modular systems. An arm built for high-speed, light electronics assembly cannot handle the payload of a heavy automotive casting robot. The mechanical layout, joints, motors, and end tools must all be carefully matched to the job.
Programming Robotic Arms Is Extremely Difficult
While advanced development requires engineering expertise, modern software has made basic operation highly accessible. Intuitive drag-and-drop programming, lead-through teaching, and virtual simulation environments allow technicians to set up new paths quickly.
Robotic Arms Require Constant Human Supervision
Once an industrial arm is properly programmed, calibrated, and integrated with safety sensors, it can run completely unattended for hours. Operators simply need to monitor the system’s status dashboard and perform scheduled maintenance checks.
FAQ Section
- What is the difference between a robot arm axis and a degree of freedom?
An axis refers to a physical moving joint on the robotic arm, whether it rotates or slides. A degree of freedom (DoF) is the independent directional movement that the arm can perform in three-dimensional space. In most standard industrial robotic arms, each additional axis adds one more degree of freedom to the system.
- How do engineers select the right end effector for a specific application?
Engineers choose an end effector by analyzing the target object’s weight, material, shape, and fragility. Fragile glass sheets require vacuum suction cups, raw metal parts require heavy-duty hydraulic claws, and small electronic components need precise pneumatic micro-grippers.
- What is a collaborative robot, and how does it differ from a standard industrial arm?
A collaborative robot, or cobot, is engineered with built-in force-limiting sensors, soft rounded edges, and restricted operating speeds. These features allow it to work safely alongside humans without protective fencing, whereas standard industrial arms must operate behind safety cages to prevent severe injuries.
- Why is inverse kinematics more challenging than forward kinematics in robot operations?
Forward kinematics is straightforward because it uses known joint angles to calculate exactly where the tool tip is. Inverse kinematics is much more difficult because it works backward; it takes a desired tool position and solves complex trigonometric equations to find the required joint angles, often resulting in multiple possible solutions or none at all.
- How does tool center point calibration affect manufacturing quality?
Tool center point (TCP) calibration tells the robot controller exactly where the tip of the tool is located relative to the wrist mounting flange. If the TCP calibration is off by even a millimeter, every programmed movement, weld seam, or part placement will be off by that exact amount, leading to defective products.
- What role do optical encoders play inside a robotic arm joint?
Optical encoders act as the primary positioning sensors inside each joint. They track the exact rotational angle of the motor shaft and send this data back to the controller in real time, allowing the system to verify that the arm is following the programmed path accurately.
- Can a robotic arm operate reliably in extreme temperature environments?
Yes, but it requires specialized protective preparation. Arms working in extreme cold, foundry heat, or spray-painting booths are outfitted with protective fabric sleeves, internal thermal management systems, and high-grade industrial seals rated for the environment.
- What is offline programming, and why do modern factories use it?
Offline programming involves using specialized software to write, test, and simulate a robot’s movements on a computer instead of using the physical arm. This approach allows engineers to fix errors and optimize paths without stopping the actual factory production line.
- What causes a robotic arm to lose its calibration over time?
Calibration loss is typically caused by continuous mechanical vibrations, normal structural wear in the gearboxes, sudden emergency stops at high speeds, or minor physical bumps with parts within the workspace.
- How long does a typical industrial robotic arm last under continuous operation?
With proper preventative maintenance, a high-quality industrial robotic arm can operate reliably for many years. Regular oil changes, seal replacements, and software updates can extend the arm’s operational lifespan significantly.
Final Summary
Mastering the basics of robotic arm operations is the first step toward understanding the broader world of modern industrial automation. Every stage of the process—from the structural interplay of bases, links, and joints to the real-time calculations performed by the controller—works together to deliver unmatched precision and speed on the factory floor. As manufacturing continues to evolve, success will belong to those who take the time to learn these foundational mechanics, programming techniques, and safety standards. True expertise comes from hands-on practice and continuous learning.