1. Introduction & Overview
What is GitOps for Robots?
GitOps for Robots is the application of the GitOps methodology—where Git acts as the single source of truth—to robotic operations (RobotOps).
It allows robotic systems (industrial robots, autonomous vehicles, warehouse bots, drones, etc.) to deploy, manage, and update their software configurations automatically through Git repositories.
Instead of manually reprogramming or updating robots, engineers use Git commits + CI/CD pipelines to update robot software, ensuring traceability, reproducibility, and automation.
History or Background
- GitOps Origins (2017): Coined by Weaveworks for Kubernetes operations.
- Rise of RobotOps (2020+): As robots became cloud-connected, industries needed DevOps-like automation for robotic fleets.
- GitOps for Robots (2022+): Adoption in manufacturing, logistics, and autonomous robotics where safe, auditable, and reliable deployments are critical.
Why is it Relevant in RobotOps?
- Robots need continuous updates (navigation algorithms, AI models, firmware).
- Manual updates are risky, especially across fleets.
- GitOps enables:
- Safe rollbacks (using Git history).
- Auditability (who changed what and when).
- Fleet-wide consistency (one commit updates all robots).
- Automation at scale (no manual SSH or USB updates).
2. Core Concepts & Terminology
Key Terms
| Term | Definition |
|---|---|
| GitOps | Ops workflow where Git is the single source of truth for system states. |
| RobotOps | DevOps applied to robotics: CI/CD, monitoring, fleet management. |
| Control Plane | The orchestration layer managing robot deployments. |
| Reconciliation Loop | The continuous process of ensuring actual state matches desired state. |
| Fleet Management | Coordinated deployment of updates to multiple robots. |
How it Fits into the RobotOps Lifecycle
- Plan → Define robot tasks, configurations, AI models.
- Code → Store software and configurations in Git.
- Build → Package robot software (ROS2 nodes, AI models, firmware).
- Deploy → GitOps agent syncs repo → robots pull updates.
- Operate → Monitor robots, update configs from Git.
- Feedback → Logs/telemetry pushed back for improvements.
3. Architecture & How It Works
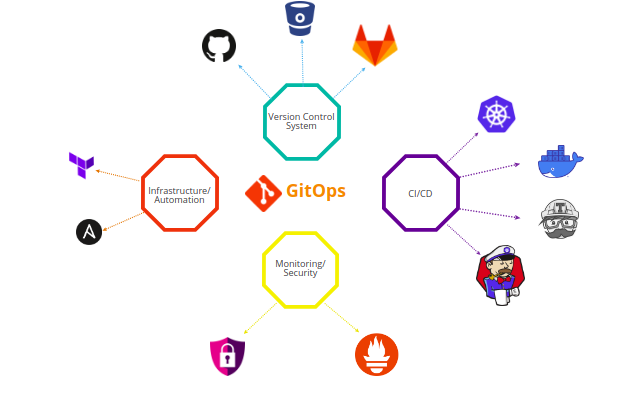
Components
- Git Repository – Stores desired state (configs, container manifests, ROS2 nodes).
- GitOps Agent (Flux/ArgoCD for Robots) – Runs in robot control plane or edge server.
- Robot Runtime (ROS2, firmware, AI models) – Executes the deployed software.
- CI/CD Pipeline – Automates build, test, and commit to Git.
- Cloud/Edge Orchestration – Manages fleet-wide rollouts.
Internal Workflow
- Engineer commits a change (e.g., new navigation parameters).
- CI/CD pipeline tests and merges to main branch.
- GitOps agent detects changes and applies updates to robot control system.
- Robots pull updates (OTA – Over-the-Air).
- Reconciliation ensures actual robot state = Git state.
Architecture Diagram (Textual Representation)
┌────────────┐
│ Git Repo │
└─────┬──────┘
│
┌─────────▼───────────┐
│ CI/CD Pipeline │
└─────────┬───────────┘
│
┌─────────▼─────────────┐
│ GitOps Controller │
│ (ArgoCD / Flux Agent) │
└─────────┬─────────────┘
│
┌────────────▼─────────────┐
│ Robot Fleet Runtime │
│ (ROS2, AI, Firmware) │
└──────────────────────────┘
Integration Points
- CI/CD Tools: Jenkins, GitHub Actions, GitLab CI.
- Cloud/Edge: AWS RoboMaker, Azure Robotics, GCP Robotics.
- Containerization: Docker, ROS2 containers.
- Monitoring: Prometheus, Grafana for robot telemetry.
4. Installation & Getting Started
Prerequisites
- GitHub/GitLab repository.
- Robots running ROS2 or similar runtime.
- Edge server or control plane (Kubernetes recommended).
- GitOps agent (FluxCD / ArgoCD).
Step-by-Step Setup (Beginner-Friendly)
- Install Kubernetes (for fleet management):
curl -LO https://storage.googleapis.com/minikube/releases/latest/minikube-linux-amd64
sudo install minikube-linux-amd64 /usr/local/bin/minikube
minikube start
2. Install ArgoCD (GitOps agent):
kubectl create namespace argocd
kubectl apply -n argocd -f https://raw.githubusercontent.com/argoproj/argo-cd/stable/manifests/install.yaml
3. Connect Git Repository:
argocd repo add https://github.com/org/robot-configs.git
4. Deploy a Robot Application (example ROS2 node):
apiVersion: apps/v1
kind: Deployment
metadata:
name: robot-navigation
spec:
replicas: 10
template:
spec:
containers:
- name: ros2-navigation
image: myrepo/ros2-navigation:latest
5. Sync to Robots:
argocd app create robot-fleet --repo https://github.com/org/robot-configs.git --path navigation --dest-server https://kubernetes.default.svc --dest-namespace robots
argocd app sync robot-fleet
✅ Now, robots automatically receive navigation updates via GitOps.
5. Real-World Use Cases
- Autonomous Delivery Drones
- Updating flight algorithms across a fleet.
- Safe rollback if a model fails.
- Warehouse Robots (e.g., Amazon Kiva)
- Coordinated update of navigation maps.
- Deployment of AI-based path optimization.
- Healthcare Robots
- Updating cleaning/disinfection bots with new routes.
- Ensuring compliance via Git audit logs.
- Autonomous Cars (RoboTaxi services)
- Fleet-wide OTA updates for driving models.
- Real-time monitoring & rollback if errors occur.
6. Benefits & Limitations
Benefits
- Fleet-wide consistency.
- Safe rollbacks.
- End-to-end traceability.
- Compliance-friendly (audit logs).
- Automation reduces downtime.
Limitations
- Requires reliable connectivity (OTA updates).
- Complexity in hybrid robot environments.
- Learning curve for robotics + GitOps tools.
- Resource-heavy (Kubernetes/containers overhead).
7. Best Practices & Recommendations
- Security:
- Use signed Git commits.
- Encrypt robot secrets with SealedSecrets/HashiCorp Vault.
- Performance:
- Use edge caching to reduce network dependency.
- Canary rollouts for fleet updates.
- Compliance:
- Maintain Git logs for ISO/IEC robotics safety compliance.
- Automation Ideas:
- Self-healing robots with GitOps reconciliation.
- Auto-revert to last stable version on failure.
8. Comparison with Alternatives
| Approach | Description | Pros | Cons |
|---|---|---|---|
| Manual Updates | USB / SSH updates to robots | Simple, no infra | Risky, no rollback, no audit |
| Traditional DevOps | CI/CD pipelines without GitOps | Fast, automated | No Git-as-truth, harder rollbacks |
| GitOps for Robots | Git-driven automation | Traceability, fleet-wide updates, compliance | Learning curve, infra overhead |
Choose GitOps for Robots when:
- Managing fleets (10–1000+ robots).
- Needing traceability & compliance.
- Requiring safe rollbacks and automation.
9. Conclusion
GitOps for Robots represents the future of RobotOps, enabling safe, automated, auditable, and scalable deployments for robotic systems.
As robotics expands into logistics, healthcare, and autonomous vehicles, GitOps-driven workflows will be the foundation of RobotOps practices.
Future Trends
- AI-driven GitOps (self-learning robot configurations).
- Integration with Digital Twins for simulation-before-deployment.
- RobotOps standardization (ISO-level compliance).
Next Steps
- Experiment with ArgoCD/Flux on a small robot fleet.
- Join communities:
- ArgoCD Community
- ROS2 GitOps Discussions
- Weaveworks GitOps
Final Thought:
Just like DevOps transformed cloud software, GitOps for Robots will transform RobotOps, ensuring that robotic fleets can evolve safely, consistently, and at scale.