1. Introduction & Overview
Robotics systems are increasingly complex, distributed, and interconnected. Modern robots—whether autonomous vehicles, drones, industrial cobots, or healthcare robots—rely on real-time communication between multiple hardware and software components.
This is where DDS (Data Distribution Service) comes in. DDS is a middleware protocol that enables scalable, real-time, and reliable data exchange across distributed robotic systems.
What is DDS?
DDS (Data Distribution Service for Real-Time Systems) is a middleware standard defined by the OMG (Object Management Group) that provides publish/subscribe communication between distributed systems with low latency, high reliability, and real-time constraints.
- It is data-centric (focuses on the data, not just messages).
- It supports QoS (Quality of Service) policies for fine-grained control.
- It is widely used in RobotOps, autonomous vehicles, military drones, and industrial automation.
History & Background
- 2003 – OMG introduced DDS as an open standard.
- 2004–2010 – Adopted by aerospace & defense industries for real-time communication.
- 2012 onwards – Popular in autonomous driving, healthcare robots, and industrial IoT.
- Today – Core middleware in ROS 2 (Robot Operating System 2), making it central to RobotOps.
Why is DDS Relevant in RobotOps?
RobotOps is the discipline of applying DevOps principles to robotics—continuous integration, automated deployment, monitoring, and scaling robotic applications.
DDS supports RobotOps by:
- Seamless communication between heterogeneous robot components.
- Cloud integration for telemetry & monitoring.
- Scalable deployments in fleets of robots.
- Standardization (used in ROS 2, the de facto robotics framework).
2. Core Concepts & Terminology
Key Terms
| Term | Definition |
|---|---|
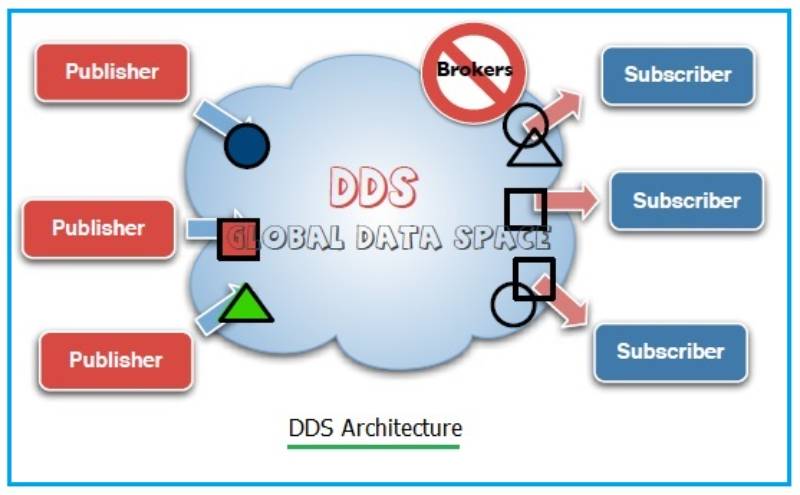
| Publisher | A process that sends data on a specific topic. |
| Subscriber | A process that receives data from a topic. |
| Topic | A named channel for structured data exchange. |
| QoS (Quality of Service) | Policies that define delivery guarantees (latency, reliability, durability). |
| Domain | A logical scope of communication, often representing a robotics system. |
| Data-Centric | DDS focuses on the state of data rather than raw messages. |
How DDS Fits into RobotOps Lifecycle
- Build Stage: RobotOps teams define data contracts (topics, QoS).
- Test Stage: CI pipelines validate DDS-based communication between components.
- Deploy Stage: DDS ensures consistent communication in distributed robots.
- Operate Stage: DDS streams telemetry to cloud dashboards for monitoring.
3. Architecture & How It Works
Core Components
- Domain Participant – The entity that represents a robot or node in DDS.
- Publisher/Subscriber – Communication roles for sending/receiving data.
- DataWriter/DataReader – Fine-grained entities that write/read to topics.
- Topic – Defines the type of data exchanged.
- QoS Policies – Configurable parameters for communication guarantees.
Internal Workflow
- A robot’s sensor node acts as a Publisher on the topic
/camera_feed. - A Subscriber node (e.g., AI perception service) listens to
/camera_feed. - DDS automatically handles discovery, message routing, and QoS enforcement.
- Data is exchanged with minimal latency, suitable for real-time control.
Architecture Diagram (Text Description)
Imagine a hubless mesh network:
- Robot A (Publisher) → Topic
/lidar_scan→ Robot B (Subscriber) - Robot C joins dynamically and subscribes to the same topic without reconfiguration.
- A cloud monitoring system subscribes to telemetry topics for fleet health.
Integration Points with CI/CD & Cloud
- CI/CD Pipelines: Validate DDS topic schemas, simulate robotic data flows.
- Cloud Integration: DDS can be bridged with Kafka, AWS IoT, or Azure IoT Hub.
- Monitoring: Export DDS telemetry into Prometheus/Grafana dashboards.
4. Installation & Getting Started
Prerequisites
- Linux (Ubuntu recommended) or macOS
- ROS 2 (optional but recommended)
- DDS implementation (choose one):
- eProsima Fast DDS (default in ROS 2)
- RTI Connext DDS (enterprise-grade)
- OpenDDS (open-source alternative)
Step-by-Step Setup with Fast DDS
- Install Dependencies
sudo apt update
sudo apt install cmake g++ git python3-pip
2. Clone Fast DDS Repository
git clone https://github.com/eProsima/Fast-DDS.git
cd Fast-DDS
3. Build and Install
mkdir build && cd build
cmake ..
make -j4
sudo make install
4. Run Publisher & Subscriber Example- Publisher:
./HelloWorldPublisher- Subscriber:
./HelloWorldSubscriber5. Verify Communication
- Subscriber prints messages published by the publisher in real time.
5. Real-World Use Cases
1. Autonomous Vehicles
- DDS manages sensor fusion (LiDAR, camera, radar) with real-time QoS.
2. Drone Swarms
- DDS allows drones to coordinate flight paths and avoid collisions.
3. Industrial Robots
- DDS ensures factory automation robots communicate with central controllers.
4. Healthcare Robots
- DDS enables real-time patient monitoring using robotic assistants.
6. Benefits & Limitations
Benefits
- Real-time performance with microseconds latency.
- Scalable to thousands of robots.
- Fault-tolerant & reliable (QoS-driven).
- Standardized & vendor-neutral.
- ROS 2 integration (making it future-proof in RobotOps).
Limitations
- Steep learning curve compared to MQTT or REST APIs.
- Complex QoS configurations can lead to misconfigured systems.
- Resource usage is higher than lightweight protocols like MQTT.
- Interoperability issues across different DDS vendors (though improving).
7. Best Practices & Recommendations
- Security: Use DDS Security extension (authentication, encryption, access control).
- Performance: Fine-tune QoS (latency budget, reliability) for robot workloads.
- Maintenance: Version control DDS topic schemas in Git.
- Automation: Validate DDS communication in CI pipelines with simulated robots.
- Compliance: Ensure DDS configurations align with safety standards (ISO 26262 for automotive, IEC 61508 for industrial robots).
8. Comparison with Alternatives
| Feature | DDS | MQTT | Kafka |
|---|---|---|---|
| Latency | Microseconds | Milliseconds | Milliseconds+ |
| Real-Time Support | ✅ | ❌ | ❌ |
| Scalability | High (mesh) | Medium (broker-based) | Very High |
| Complexity | High | Low | Medium |
| Standardization | OMG DDS Standard | OASIS Standard | Apache Project |
When to choose DDS?
- Use DDS for robotics, aerospace, defense, and healthcare robots where real-time & reliability are critical.
- Use MQTT/Kafka for IoT telemetry, analytics, or non-real-time workloads.
9. Conclusion
DDS (Data Distribution Service) is not just another communication middleware—it is the backbone of modern robotics communication. By combining real-time publish/subscribe messaging, QoS guarantees, and ROS 2 integration, DDS powers the future of RobotOps.
Future Trends
- DDS over 5G for mobile robotics fleets.
- DDS + AI Ops for self-healing robot swarms.
- Edge-cloud hybrid DDS for smart factories.
Next Steps
- Explore ROS 2 with DDS (default middleware).
- Experiment with QoS policies in real robotic simulations.
- Join DDS communities for advanced use cases.