1. Introduction & Overview
What is Build Automation?
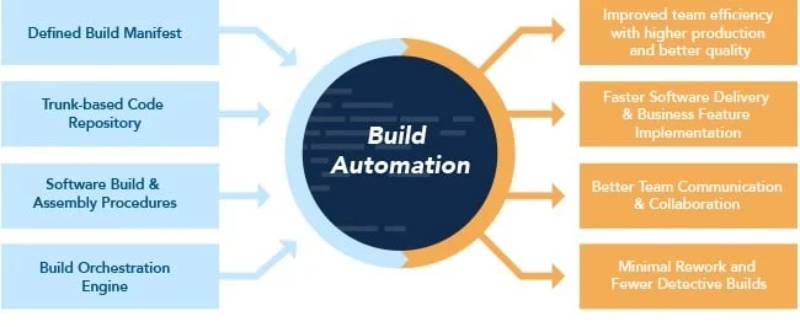
Build Automation is the process of automating the creation of executable applications from source code. In software engineering, it involves compiling code, packaging binaries, running tests, and preparing artifacts for deployment. In the RobotOps context, build automation ensures robotic applications, firmware, and AI models are consistently built, tested, and delivered without manual intervention.
History & Background
- Early days (1990s–2000s): Manual build processes using scripts (
make,ant). - Modern CI/CD era (2010+): Jenkins, GitLab CI, GitHub Actions emerged to automate builds in DevOps.
- RobotOps evolution (2020+): Specialized needs for robotic systems (sensor drivers, ROS packages, embedded firmware, ML models) require advanced build automation that integrates hardware-in-the-loop (HIL), robotics middleware (ROS/ROS2), and simulation platforms.
Why is it Relevant in RobotOps?
Robots have complex software stacks:
- Firmware + AI inference + robotics middleware.
- Hardware dependencies (controllers, sensors).
- Strict safety and reliability requirements.
Build automation ensures:
- Consistency: Every robot build is identical and reproducible.
- Speed: Faster iteration cycles for robotics software.
- Reliability: Automatic validation through test frameworks (simulation + real hardware).
2. Core Concepts & Terminology
Key Terms
- Build Script: Instructions for compiling, testing, and packaging.
- Artifact: Output of a build (binary, firmware, container image).
- CI/CD: Continuous Integration/Continuous Deployment, closely tied to build automation.
- ROS (Robot Operating System): Middleware frequently requiring build automation for package management.
- Cross-compilation: Building code for different robotic hardware architectures (e.g., ARM).
Build Automation in RobotOps Lifecycle
RobotOps lifecycle = Code → Build → Test → Deploy → Monitor.
- Build automation covers Code → Build → Package.
- Integrates tightly with simulation (Gazebo, Webots) and deployment (Kubernetes, edge devices).
3. Architecture & How It Works
Components of Build Automation in RobotOps
- Source Control Integration – GitHub, GitLab, Bitbucket.
- Build Orchestrator – Jenkins, GitHub Actions, GitLab CI, Azure Pipelines.
- Build Tools – CMake, Colcon (ROS), Bazel, Docker.
- Artifact Repository – Nexus, Artifactory, Docker Hub.
- Test Automation – Unit tests, simulation tests, hardware-in-loop (HIL).
Internal Workflow
- Code Commit → Trigger build pipeline.
- Dependency Installation → Install ROS packages, drivers, libraries.
- Build & Compile → Firmware + AI model + robot middleware.
- Testing Phase → Simulation + Unit testing.
- Artifact Packaging → Container images, binaries, firmware.
- Distribution → Store in registry/repo for deployment.
Architecture Diagram (textual representation)
Developer Commit → CI/CD Pipeline → Build System → Test (Sim/HIL)
→ Artifact Repo → Robot Deployment
Integration with CI/CD & Cloud Tools
- CI/CD Pipelines: GitLab CI, Jenkins.
- Cloud Robotics: AWS RoboMaker, Google Cloud Robotics.
- Containerization: Docker, Podman, Kubernetes.
4. Installation & Getting Started
Prerequisites
- Git installed.
- Docker/Podman installed (for container builds).
- ROS/ROS2 environment (for robotics middleware).
- A CI/CD tool (e.g., GitHub Actions or Jenkins).
Step-by-Step Setup (Example: GitHub Actions + ROS2)
- Create Repository: Push your robot code to GitHub.
- Add Workflow File:
.github/workflows/build.yml
name: Robot Build Pipeline
on: [push, pull_request]
jobs:
build:
runs-on: ubuntu-latest
steps:
- name: Checkout Code
uses: actions/checkout@v3
- name: Setup ROS2
run: sudo apt install -y ros-foxy-desktop
- name: Build ROS2 Packages
run: colcon build --symlink-install
- name: Run Unit Tests
run: colcon test
- Commit & Push: Triggers the pipeline.
- View Results: Logs show build + test results.
- Artifacts: Upload binaries/firmware as GitHub artifacts or Docker images.
5. Real-World Use Cases
- Autonomous Mobile Robots (AMRs): Automating firmware + ROS navigation stack builds for warehouse robots.
- Industrial Arms: Build automation compiles motion control drivers and ensures deterministic builds for robotic arms.
- Drone Fleet Ops: Cross-compiling PX4 firmware for multiple drone models automatically.
- Healthcare Robots: Packaging ML-driven vision software in Docker images with automated validation.
6. Benefits & Limitations
Benefits
- Reproducibility: Same build across teams.
- Efficiency: Eliminates manual steps.
- Scalability: Works for multiple robots and architectures.
- Faster Innovation: Continuous builds with test coverage.
Limitations
- Complexity: Requires setup of build servers + cross-compilers.
- Hardware Dependency: Simulation may not always reflect real hardware.
- Resource Cost: CI/CD runners for robotics builds are compute-heavy.
7. Best Practices & Recommendations
- Security:
- Scan dependencies (SCA tools like Snyk).
- Sign and verify build artifacts.
- Performance:
- Cache dependencies to reduce build time.
- Use distributed build systems (Bazel, remote caching).
- Maintenance:
- Document build scripts.
- Keep pipelines modular and reusable.
- Compliance:
- Follow ISO 26262 (Automotive), IEC 61508 (Safety) for robotic safety-critical builds.
- Automation Ideas:
- Automated simulation testing with Gazebo before merging PRs.
- Auto-deploy artifacts to Kubernetes clusters controlling robots.
8. Comparison with Alternatives
| Approach | Build Automation | Manual Build | Script-only Build |
|---|---|---|---|
| Consistency | ✅ High | ❌ Low | ⚠️ Medium |
| Scalability | ✅ Excellent | ❌ Poor | ⚠️ Limited |
| Error-prone | ❌ Minimal | ❌ High | ⚠️ Moderate |
| Best for RobotOps | ✅ Yes | ❌ No | ⚠️ Small Teams |
When to choose Build Automation:
- Large robotic systems with multiple modules.
- Safety-critical robotics requiring consistency.
- Multi-robot deployment environments.
9. Conclusion
Final Thoughts
Build Automation is the backbone of RobotOps. By automating compilation, testing, and packaging, robotics teams achieve faster innovation, higher reliability, and scalable deployments.
Future Trends
- AI-driven Build Optimization: Predict build failures with ML.
- Hardware-in-the-loop CI/CD: Automated real robot testing.
- Cloud-Native RobotOps: Full pipeline running on Kubernetes.
Next Steps
- Start with GitHub Actions or Jenkins for small projects.
- Scale to cloud-native tools (AWS RoboMaker, ROS2 with Kubernetes).
- Explore artifact repositories (Nexus, Artifactory) for robotic builds.