📌 Introduction & Overview
🔍 What is Robot Fleet Management?
Robot Fleet Management refers to the software systems and frameworks used to control, monitor, and coordinate a large group of autonomous or semi-autonomous robots. These platforms handle task allocation, telemetry, updates, and health monitoring across a distributed robotic ecosystem.
In DevSecOps, robot fleet management ensures continuous integration and secure delivery pipelines for physical robotic assets — integrating operational automation with software-defined infrastructure.
🕰️ History or Background
- Early Days: Initially, robotic systems were managed individually using on-device software and manual updates.
- Middleware Evolution: Middleware like ROS (Robot Operating System) introduced abstraction layers.
- Modern Fleet Systems: Platforms like Open-RMF, AWS RoboRunner, and Clearpath’s Fleet Manager introduced centralized orchestration.
- Integration into DevSecOps: Emerged as robots became part of critical infrastructure (e.g., warehouses, defense, healthcare).
🎯 Why Is It Relevant in DevSecOps?
- CI/CD for robots: Enable rapid deployment and testing of firmware/AI models.
- Security enforcement: Apply consistent security policies across distributed assets.
- Observability: Monitor robot health and telemetry similar to cloud-native services.
- Scalability: Coordinate large-scale fleets across geographies and networks.
📚 Core Concepts & Terminology
🧩 Key Terms and Definitions
| Term | Definition |
|---|---|
| Fleet | A group of robots managed centrally. |
| Missions | Task definitions assigned to robots. |
| Teleoperation | Remote control of a robot by a human operator. |
| Telemetry | Data collected from the robot (e.g., battery, status). |
| Firmware Updates | Over-the-air updates to robot OS/firmware. |
| SLAM | Simultaneous Localization and Mapping – a navigation method. |
🔄 How It Fits into the DevSecOps Lifecycle
| DevSecOps Phase | Robot Fleet Management Contribution |
|---|---|
| Plan | Mission planning, task design |
| Develop | Robot application development (ROS, AI models) |
| Build | CI pipeline for containerized firmware updates |
| Test | Simulation & hardware-in-loop testing |
| Release | OTA software release to robots |
| Deploy | Live mission assignment and route optimization |
| Operate | Monitor telemetry, health, and failures |
| Monitor | Collect metrics, logs, security alerts |
| Secure | Apply firmware signing, access controls, compliance |
🏗️ Architecture & How It Works
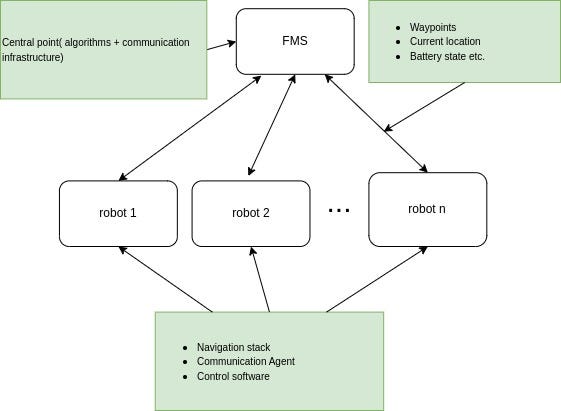
🧱 Components
- Fleet Manager Server: Central coordination and orchestration.
- Robot Clients (Agents): Embedded software agents on each robot.
- Mission Scheduler: Dispatch engine for dynamic task assignment.
- Telemetry Collector: Streams sensor data to a backend (e.g., Prometheus, ELK).
- OTA Manager: Manages firmware and software updates.
- Security Enforcer: Implements zero trust, encryption, and IAM policies.

🔁 Internal Workflow
- Developer pushes firmware to repo.
- CI/CD pipeline builds, signs, and tests firmware (e.g., using Jenkins + ROS).
- OTA Manager deploys updates to the fleet.
- Fleet Manager assigns missions.
- Robots execute tasks, streaming telemetry.
- Monitoring and alerts notify of anomalies or security issues.
🖼️ Architecture Diagram (Descriptive)
+---------------------------+
| DevSecOps Pipeline |
| (GitHub, Jenkins, SAST) |
+------------+--------------+
|
v
+----------------------------+
| OTA Manager |
| (Updates, Validation) |
+-------------+--------------+
|
v
+-------------------+
| Fleet Manager |<-------------+
| (Missions, Routes)| |
+----+--------+-----+ |
| | |
v v |
+---------+--+ +--+---------+ +--+--------+
| Robot 1 | | Robot N | <--->| Telemetry |
| Agent + AI | | Agent + AI | | Collector |
+------------+ +-------------+ +-----------+
🔌 Integration Points with CI/CD and Cloud Tools
| Tool | Integration Role |
|---|---|
| Jenkins/GitHub Actions | Build/test/deploy firmware and containers |
| ROS/ROS2 | Middleware for robot logic |
| AWS RoboRunner | Cloud-based orchestration |
| Vault/KMS | Secrets management for robot credentials |
| Prometheus/Grafana | Monitoring and alerting |
| ElasticSearch | Telemetry and log analytics |
🛠️ Installation & Getting Started
⚙️ Prerequisites
- Ubuntu 22.04 or ROS-supported OS
- Docker, Git, Python 3.10+
- ROS2 installed (e.g.,
humble) - CI tools: GitHub Actions or Jenkins
- MQTT or WebSocket broker for telemetry
👨🔬 Step-by-Step Setup (Example: Mini-Fleet with ROS2)
# Step 1: Install ROS2 (Humble)
sudo apt update
sudo apt install ros-humble-desktop
source /opt/ros/humble/setup.bash
# Step 2: Create workspace and clone robot logic
mkdir -p ~/robot_ws/src && cd ~/robot_ws/src
git clone https://github.com/ros-planning/navigation2.git
cd ..
colcon build
source install/setup.bash
# Step 3: Setup Fleet Manager (e.g., Open-RMF)
git clone https://github.com/open-rmf/rmf
cd rmf
docker-compose up -d
# Step 4: Simulate robot agent
ros2 launch nav2_bringup tb3_simulation_launch.py
🌐 Real-World Use Cases
🏭 1. Manufacturing Automation
- Manage AGVs (Autonomous Guided Vehicles) in smart factories.
- Ensure secure software updates and route planning.
🏥 2. Healthcare Robots
- Schedule cleaning and delivery robots in hospitals.
- Enforce patient data privacy and access control.
🛒 3. Retail & Warehousing
- Coordinate item pick-up robots in fulfillment centers.
- Integrate with ERP and inventory systems via CI/CD pipelines.
🚜 4. Agriculture
- Drones and UGVs managed to optimize seeding, irrigation, and harvesting.
✅ Benefits & Limitations
✔️ Key Advantages
- Centralized control across fleets
- Over-the-air updates with validation
- Security via access control, encryption
- Integration with DevSecOps pipelines
- Reduced downtime and proactive maintenance
⚠️ Limitations
- High initial setup complexity
- Requires reliable network connectivity
- Security vulnerabilities in communication protocols (MQTT, Wi-Fi)
- Hardware compatibility issues with generic software agents
🛡️ Best Practices & Recommendations
🔐 Security
- Use TLS/SSL for all robot-to-server communication
- Implement firmware signing and OTA verification
- Isolate fleet networks via VLANs/VPNs
🧪 Performance & Monitoring
- Use hardware-in-loop (HIL) testing in CI pipelines
- Monitor metrics like battery, CPU, path deviation
✅ Compliance
- Ensure data locality and GDPR compliance
- Automate logs for audit trails
🤖 Automation Ideas
- Auto-discovery and registration of new robots
- Auto-remediation on anomaly detection
🔁 Comparison with Alternatives
| Feature / Tool | Open-RMF | AWS RoboRunner | Custom ROS2 Fleet |
|---|---|---|---|
| Open Source | ✅ | ❌ | ✅ |
| Cloud-Integrated | Partial | ✅ | ❌ |
| Security Features | Moderate | High | Varies |
| DevSecOps Friendly | ✅ | ✅ | ✅ |
| Ease of Setup | Moderate | Easy | Hard |
🧐 When to Choose Robot Fleet Management
- You have >5 autonomous robots that must collaborate.
- You need secure CI/CD integration for robotic firmware.
- You’re operating in regulated environments (e.g., healthcare, aerospace).
🔚 Conclusion
Robot Fleet Management bridges the gap between physical automation and software pipelines. In the DevSecOps world, it brings essential capabilities like secure delivery, compliance, telemetry, and automation to autonomous systems.
With tools like Open-RMF, AWS RoboRunner, and ROS2, teams can scale fleets without compromising agility or security. As robotics expands across industries, integrating fleet management into DevSecOps is not just strategic—it’s essential.