1. Introduction & Overview
What are Underwater Robots (ROVs)?
- ROVs (Remotely Operated Vehicles) are tethered underwater robots controlled by operators from the surface.
- They are primarily used for:
- Deep-sea exploration
- Offshore oil & gas maintenance
- Underwater infrastructure inspection
- Search and rescue missions
- In RobotOps (Robotics Operations), ROVs are operational assets that require monitoring, automation, logging, CI/CD pipelines, and remote observability for effective lifecycle management.
History or Background
- 1950s – First tethered ROV prototypes developed for military mine clearance.
- 1960s–70s – ROVs were used by the U.S. Navy for submarine recovery.
- 1980s–90s – Commercial adoption in offshore oil & gas for pipeline inspection.
- 2000s – Miniaturized ROVs became accessible for scientific research and underwater archaeology.
- Today – Advanced AI, IoT, cloud integration, and RobotOps pipelines make ROVs smarter, autonomous, and data-driven.
Why are ROVs Relevant in RobotOps?
- RobotOps ensures that robots (including underwater ROVs) are:
- Continuously monitored
- Automatically updated with new software
- Secured against cyber threats
- Efficiently logged and auditable
- With CI/CD pipelines, ROVs can get real-time firmware updates, automated testing, and seamless integration with cloud monitoring dashboards.
2. Core Concepts & Terminology
| Term | Definition | Relevance in RobotOps |
|---|---|---|
| ROV (Remotely Operated Vehicle) | A tethered underwater robot controlled from the surface. | Primary asset under RobotOps. |
| AUV (Autonomous Underwater Vehicle) | An autonomous robot without tethers. | Alternative to ROVs, less controlled but more independent. |
| Tether | Cable that connects ROV to surface ship. | Used for power & data transfer. |
| Manipulator Arm | Robotic arm used for handling underwater objects. | Needs RobotOps monitoring for wear & tear. |
| Thrusters | Propulsion units for movement. | Requires telemetry monitoring. |
| RobotOps Pipeline | CI/CD + Monitoring lifecycle for robots. | Ensures smooth operations & updates. |
How ROVs Fit into the RobotOps Lifecycle
- Build Phase – Develop and test ROV control software.
- CI/CD Deployment – Push updates to ROV systems remotely.
- Monitoring & Telemetry – Real-time logging of depth, pressure, and motor performance.
- Security & Compliance – Ensure encrypted communication and compliance with maritime laws.
- Incident Response – Automated rollback if new firmware update fails.
3. Architecture & How It Works
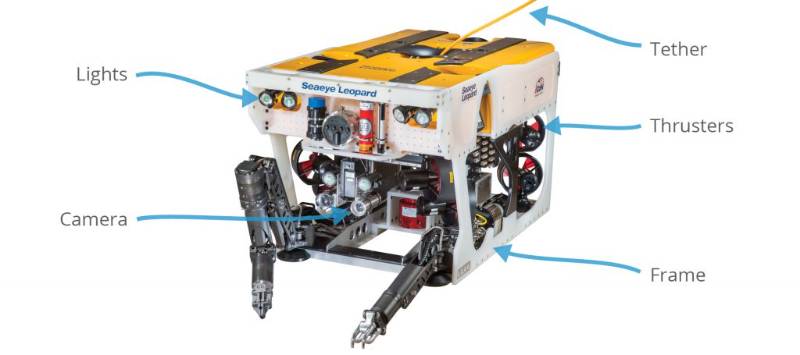
Core Components of an ROV
- Mechanical Systems: Thrusters, manipulator arms, frame.
- Control Systems: Joysticks, surface computers, AI-assisted navigation.
- Sensors: Cameras, sonar, depth sensors, temperature probes.
- Tether System: Power + data cable to surface.
- Cloud/RobotOps Layer: Telemetry collection, CI/CD pipeline, logs, monitoring, anomaly detection.
Internal Workflow
- Operator inputs command via joystick / cloud API.
- Commands travel through tether → onboard ROV controller.
- Sensors collect real-time data and send it back to the surface.
- Data is pushed to cloud RobotOps platform for monitoring.
- CI/CD pipelines update ROV firmware and control software automatically.
Architecture Diagram (Described)
+-------------------+ +------------------+
| Surface Control | <---> | Cloud RobotOps |
| Station (Laptop) | | (CI/CD, Logging, |
| | | Monitoring, AI) |
+---------^---------+ +--------^---------+
| |
(Tether Cable) (Internet / API)
| |
+---------v---------+ +--------v---------+
| Underwater ROV | <--> | RobotOps Agents |
| Thrusters, Arms, | | (Telemetry, |
| Sensors, Cameras | | Updates, Security|
+-------------------+ +------------------+
Integration Points with CI/CD or Cloud Tools
| Tool | Role in ROV RobotOps |
|---|---|
| GitHub Actions / GitLab CI | Automates firmware/software builds & testing. |
| AWS IoT Greengrass | Secure cloud-edge communication for telemetry. |
| Kubernetes (K8s) | Orchestrates multiple ROVs as microservices. |
| Prometheus + Grafana | Monitoring & real-time dashboards. |
| Vault (HashiCorp) | Secrets management for secure API keys. |
4. Installation & Getting Started
Prerequisites
- Basic ROV kit (e.g., BlueROV2)
- Surface control station (laptop with Ubuntu/ROS installed)
- Internet connection for RobotOps integration
- Docker + Git for CI/CD
Step-by-Step Setup
- Install Required Software
sudo apt update
sudo apt install docker docker-compose git
2. Clone ROV Control Software
git clone https://github.com/bluerobotics/rov-software.git
cd rov-software
3. Run in Docker (ROS-based)
docker-compose up -d
4. Connect to ROV
- Plug tether into Ethernet port.
- Run
ifconfigto check network connectivity.
5. Integrate with Cloud Monitoring
- Configure Prometheus exporter for telemetry:
scrape_configs:
- job_name: 'rov'
static_configs:
- targets: ['192.168.2.2:9100']
5. Real-World Use Cases
| Industry | Use Case | How RobotOps Helps |
|---|---|---|
| Oil & Gas | Pipeline inspection, leak detection | CI/CD ensures updated AI models for anomaly detection. |
| Marine Research | Deep-sea exploration | Telemetry logs stored in cloud for later analysis. |
| Defense | Naval mine clearance | RobotOps ensures secure encrypted comms. |
| Search & Rescue | Locating wrecks, disaster response | Automated monitoring reduces downtime. |
6. Benefits & Limitations
Key Benefits
- High precision in hostile underwater environments.
- Continuous monitoring & updates via RobotOps pipelines.
- Reduced human risk in deep-sea exploration.
- Integration with AI/ML for anomaly detection.
Limitations
- High cost of ROV deployment.
- Dependency on tether (limits mobility).
- Network latency in cloud-connected operations.
- Maintenance complexity (thrusters & sensors require upkeep).
7. Best Practices & Recommendations
- Security: Use end-to-end encryption (TLS) for control signals.
- Performance: Automate health checks via Prometheus alerts.
- Maintenance: Schedule thruster calibration & pressure seal checks.
- Compliance: Align with IMO (International Maritime Organization) and local regulations.
- Automation Idea: Use Kubernetes operators to scale monitoring across multiple ROVs.
8. Comparison with Alternatives
| Aspect | ROVs (Tethered) | AUVs (Autonomous) |
|---|---|---|
| Control | Real-time operator control | Fully autonomous |
| Power Supply | Via tether | Onboard batteries |
| Data Transfer | Continuous, live | Stored, post-mission upload |
| Cost | High (surface vessel required) | Moderate |
| RobotOps Integration | Easier (always connected) | Harder (limited connectivity) |
When to choose ROVs?
- When real-time control and continuous monitoring are required (e.g., pipeline repair).
9. Conclusion
- ROVs (Underwater Robots) are vital in industries where human divers cannot reach.
- With RobotOps, ROVs move beyond hardware to become cloud-integrated, automated, and secure robotic platforms.
- Future Trends:
- AI-driven autonomous navigation
- Edge-cloud hybrid operations
- Swarm-based underwater robotics
Resources:
- Blue Robotics
- Robot Operating System (ROS)
- ROV Community Forum