1. Introduction & Overview
What is Wi-Fi Mesh for Robots?
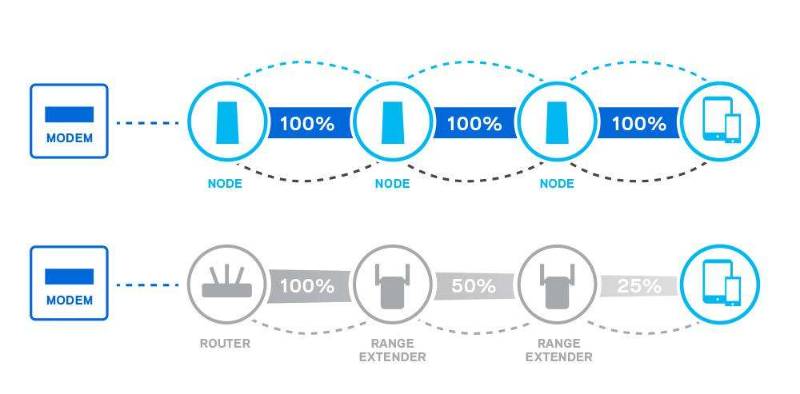
Wi-Fi Mesh for Robots refers to the deployment of mesh networking technology to enable reliable, low-latency, and self-healing connectivity among distributed robotic systems. Unlike traditional Wi-Fi that relies on a central access point, a mesh network allows each robot to act as a node that connects to others, ensuring uninterrupted communication even if one node fails.
In RobotOps (the discipline of applying DevOps principles to robotics), connectivity is the backbone of monitoring, controlling, updating, and orchestrating fleets of robots. Mesh Wi-Fi ensures robots remain connected in dynamic environments such as factories, warehouses, disaster zones, or agricultural fields.
History or Background
- Early Robotics Networking: Initially, robots relied on centralized access points, often leading to dead zones and single points of failure.
- Military & Research Origins: Mesh networks were first popularized in defense research (DARPA projects, MANETs—Mobile Ad Hoc Networks) where mobile units needed resilient connectivity.
- Commercial Evolution: With the rise of IoT and autonomous robotics, Wi-Fi mesh systems (802.11s and proprietary protocols) have become standard for multi-robot fleets.
Why is it Relevant in RobotOps?
- Continuous Monitoring: Enables CI/CD pipelines to push updates and monitor telemetry without downtime.
- Autonomous Coordination: Robots exchange data directly, improving swarm intelligence.
- Scalability: Supports large fleets without requiring expensive centralized infrastructure.
- Resilience: Network heals itself if a robot/node goes offline.
2. Core Concepts & Terminology
Key Terms
- Mesh Node: Each robot/device in the network.
- Gateway Node: Node with internet/cloud connectivity for external communication.
- Self-Healing: Ability of the network to reroute traffic automatically.
- Hop Count: Number of mesh nodes data must traverse before reaching its destination.
- 802.11s: IEEE standard for Wi-Fi mesh networking.
- QoS (Quality of Service): Mechanism for prioritizing critical robot commands over less urgent data.
Role in RobotOps Lifecycle
| RobotOps Phase | Role of Wi-Fi Mesh |
|---|---|
| Plan | Estimate coverage, select frequency (2.4 GHz vs 5 GHz). |
| Build | Integrate mesh drivers/libraries in robotic firmware. |
| Deploy | Rollout mesh-enabled robots in the field. |
| Operate | Monitor connectivity, optimize routes, ensure uptime. |
| Optimize | Use telemetry to improve routing and bandwidth. |
3. Architecture & How It Works
Components
- Robotic Mesh Nodes – Robots equipped with Wi-Fi mesh radios.
- Gateway Node – Connects the mesh network to cloud/CI/CD tools.
- Mesh Controller (Optional) – Software layer to manage topology and security policies.
- Telemetry Collector – Gathers data for RobotOps dashboards.
Internal Workflow
- Robot boots → joins nearest mesh node.
- Dynamic routing protocols (HWMP or OLSR) assign paths.
- Data packets hop across nodes until they reach the gateway.
- RobotOps CI/CD pipelines push updates via the gateway → mesh → target robot.
Architecture Diagram (described)
Imagine a mesh grid:
- Each robot node (R1, R2, R3…) is connected not just to a central router but also to neighboring robots.
- One or more gateway robots connect to the cloud for monitoring and updates.
- Data can take multiple paths, ensuring resilience.
Integration with CI/CD & Cloud Tools
- GitHub Actions / GitLab CI → push firmware updates over-the-air via the mesh.
- Kubernetes + ROS (Robot Operating System) → manage robotic pods, ensuring connectivity.
- Cloud Telemetry (AWS IoT, Azure IoT Hub) → aggregate data from gateway nodes.
4. Installation & Getting Started
Prerequisites
- Robots with Wi-Fi mesh capable adapters (supporting 802.11s).
- A Linux-based OS (Ubuntu preferred).
- Mesh tools:
iw,wpa_supplicant, orbatman-advfor advanced routing.
Step-by-Step Setup Guide (Beginner-Friendly)
Step 1: Enable Wi-Fi Mesh on Linux Robot
# Bring up Wi-Fi interface
sudo ip link set wlan0 down
sudo iw wlan0 set type mp
sudo ip link set wlan0 up
# Create mesh network
sudo iw wlan0 mesh join robot-mesh freq 2412
Step 2: Verify Connectivity
sudo iw wlan0 info
ping <neighbor-robot-ip>
Step 3: Configure Gateway Node
# Enable NAT forwarding for internet access
sudo sysctl -w net.ipv4.ip_forward=1
sudo iptables -t nat -A POSTROUTING -o eth0 -j MASQUERADE
Step 4: Integrate with RobotOps Pipeline
- Add OTA update jobs in Jenkins or GitHub Actions.
- Use SSH-over-mesh for deployments.
5. Real-World Use Cases
- Warehouse Automation
- Robots deliver items across large warehouses.
- Mesh ensures coverage without installing dozens of routers.
- Agricultural Robotics
- Drones and ground robots share crop health data over mesh.
- No need for rural internet infrastructure.
- Disaster Response Robots
- Search-and-rescue robots maintain communication in collapsed buildings where normal Wi-Fi fails.
- Factory Floor Automation
- Collaborative robots (cobots) coordinate tasks without relying on a single Wi-Fi AP.
6. Benefits & Limitations
Advantages
- High Availability: No single point of failure.
- Scalability: Add new robots seamlessly.
- Dynamic Routing: Adapts to changing topologies.
- Cost-Effective: No need for industrial-grade APs everywhere.
Limitations
- Latency: Multi-hop communication may introduce delays.
- Power Consumption: More radio activity drains batteries faster.
- Security Risks: More nodes = more attack surfaces.
- Bandwidth Sharing: Limited throughput when many nodes transmit simultaneously.
7. Best Practices & Recommendations
- Security
- Use WPA3 encryption with unique robot credentials.
- Implement intrusion detection at gateway nodes.
- Performance
- Limit hop counts (<5 ideally).
- Prefer 5 GHz for high bandwidth; 2.4 GHz for range.
- Maintenance
- Automate OTA firmware updates via CI/CD.
- Regularly rotate mesh keys and monitor logs.
- Compliance & Automation
- Ensure compliance with ISO 10218 (robot safety) and NIST IoT guidelines.
- Use Infrastructure-as-Code (IaC) to define mesh deployments.
8. Comparison with Alternatives
| Approach | Pros | Cons | When to Use |
|---|---|---|---|
| Wi-Fi Mesh | Self-healing, cost-effective, easy to scale | Latency in multi-hop | Warehouses, factories, agriculture |
| Cellular (4G/5G) | High bandwidth, wide coverage | Costly, depends on carrier | Outdoor fleets, long-range drones |
| LoRaWAN | Very long range, low power | Very low bandwidth | Environmental monitoring robots |
| Zigbee/Z-Wave | Energy-efficient, mesh capable | Short range, low speed | Home robotics, IoT devices |
9. Conclusion
Wi-Fi Mesh for Robots is a cornerstone of RobotOps, enabling resilient, scalable, and cost-effective networking for robotic fleets. Its role in continuous deployment, telemetry, and real-time coordination makes it invaluable in both industrial and research applications.
Future Trends
- Wi-Fi 6 Mesh: Lower latency, higher capacity.
- AI-driven Mesh Routing: Adaptive routing using ML.
- Hybrid Mesh: Combining Wi-Fi with 5G or LoRa.
Next Steps
- Experiment with 802.11s on test robots.
- Integrate with RobotOps pipelines (GitHub Actions, Kubernetes).
- Explore open-source projects like B.A.T.M.A.N. Advanced for routing.
Resources
- IEEE 802.11s Standard
- BATMAN-adv Documentation
- ROS 2 Networking