1. Introduction & Overview
What is MQTT?
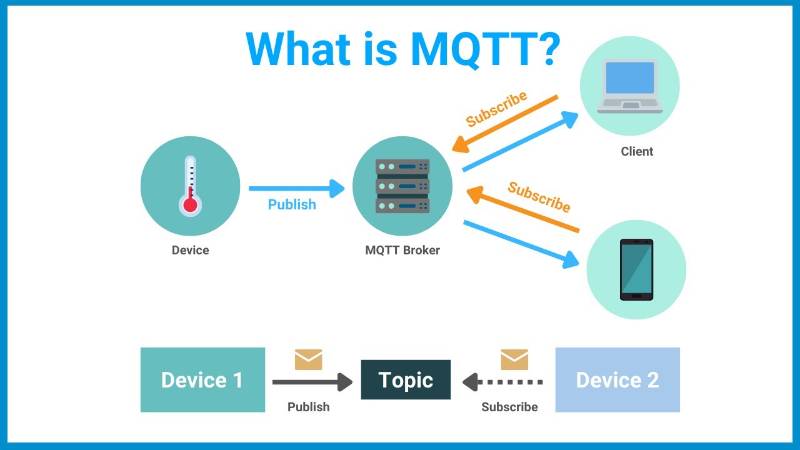
MQTT (Message Queuing Telemetry Transport) is a lightweight, publish/subscribe messaging protocol designed for devices with limited bandwidth and processing power. It’s widely used in IoT, robotics, and automation systems to ensure efficient, real-time communication between distributed components.
- Protocol type: Publish/Subscribe
- Transport: TCP/IP
- Focus: Lightweight, reliable communication in constrained networks
History & Background
- 1999: Developed by Andy Stanford-Clark (IBM) and Arlen Nipper (Arcom).
- Initially created for oil pipeline sensors to transmit data over satellite links with low bandwidth.
- Today, it’s an OASIS and ISO standard, powering modern IoT, robotics, and industrial automation.
Why is MQTT Relevant in RobotOps?
RobotOps (Robotics + DevOps) focuses on managing robotic systems with DevOps principles like automation, CI/CD, and monitoring. MQTT plays a central role in RobotOps by:
- Enabling real-time communication between robots, sensors, and cloud.
- Simplifying scalable orchestration of robotic fleets.
- Supporting low-latency, reliable messaging in mission-critical environments.
2. Core Concepts & Terminology
Key Terms
| Term | Definition |
|---|---|
| Broker | Central server that routes messages between publishers and subscribers. |
| Client | Any device (robot, sensor, app) connecting to MQTT broker. |
| Topic | Hierarchical string used to organize and route messages. Example: robot/arm1/status. |
| Publisher | Client that sends messages to a topic. |
| Subscriber | Client that receives messages from a topic. |
| QoS (Quality of Service) | Defines delivery guarantees: – QoS 0: At most once – QoS 1: At least once – QoS 2: Exactly once |
| Last Will & Testament (LWT) | Predefined message sent by broker if a client disconnects unexpectedly. |
Fit in RobotOps Lifecycle
- Development: Robots publish telemetry during testing.
- CI/CD: MQTT integrates with pipelines for deployment feedback loops.
- Operations: Central monitoring of fleet performance using MQTT dashboards.
- Automation: Triggers robot actions from cloud-based orchestration tools.
3. Architecture & How It Works
Components
- MQTT Broker: (e.g., Eclipse Mosquitto, HiveMQ) – hub for message routing.
- Robots (Clients): Publish telemetry (
position,battery,errors) or subscribe to commands (move,stop). - Control Center (Apps/Cloud): Subscribes to telemetry topics, sends control messages.
Workflow
- A robot publishes telemetry to topic
robot1/sensors/temp. - The MQTT broker receives and stores the message.
- Any client subscribed to
robot1/sensors/tempgets the update.
Architecture Diagram (text description)
[ Robot Sensors ] --> (Publisher) --> [ MQTT Broker ] --> (Subscriber) --> [ RobotOps Control Center ]
Integration with CI/CD & Cloud
- CI/CD: MQTT can notify pipeline jobs (e.g., firmware deployment success/failure).
- Cloud Platforms:
- AWS IoT Core (native MQTT support)
- Azure IoT Hub
- Google IoT Core (via MQTT bridge)
4. Installation & Getting Started
Prerequisites
- Linux/Mac/Windows system
- Python 3 or Node.js
- MQTT Broker (e.g., Eclipse Mosquitto)
Step-by-Step Setup (using Mosquitto)
1. Install Mosquitto Broker (Ubuntu example):
sudo apt update
sudo apt install mosquitto mosquitto-clients -y
2. Start the broker:
sudo systemctl enable mosquitto
sudo systemctl start mosquitto
3. Publish a message:
mosquitto_pub -h localhost -t "robot/test" -m "Hello RobotOps"
4. Subscribe to a topic:
mosquitto_sub -h localhost -t "robot/test"
5. Test (open two terminals):
- Terminal 1 → Subscriber
- Terminal 2 → Publisher
You’ll see the message instantly delivered. ✅
5. Real-World Use Cases in RobotOps
1. Fleet Management
- Drones publish
locationupdates → central dashboard subscribes for real-time tracking.
2. Predictive Maintenance
- Robotic arms publish
vibration data→ cloud ML system analyzes → sends alerts if anomaly detected.
3. Remote Updates
- CI/CD pipeline publishes
firmware update success/failure→ robots acknowledge.
4. Industrial Automation
- Assembly line robots subscribe to
start/stopcommands broadcast via MQTT.
6. Benefits & Limitations
Benefits
- Lightweight, ideal for resource-constrained robots.
- Reliable with QoS levels.
- Works in low-bandwidth, high-latency networks.
- Easy to scale for thousands of clients.
Limitations
- Requires broker availability (single point of failure unless clustered).
- Security not built-in (must use TLS + authentication).
- Not suitable for large binary data (e.g., video streams).
7. Best Practices & Recommendations
- 🔒 Security: Always use TLS encryption + username/password or certificates.
- 📊 Monitoring: Use Prometheus + Grafana for MQTT broker metrics.
- ⚡ Performance: Optimize topic hierarchy (
robot/arm1/statusinstead ofstatus). - 🤖 Automation: Integrate MQTT with GitHub Actions or Jenkins for deployment feedback.
- ✅ Compliance: Follow industry standards like ISO/IEC 20922 (MQTT).
8. Comparison with Alternatives
| Protocol | Use Case | Pros | Cons |
|---|---|---|---|
| MQTT | Robotics, IoT, telemetry | Lightweight, reliable, pub/sub | Broker dependency |
| AMQP | Enterprise messaging | Advanced routing, transactions | Heavier, slower |
| CoAP | Constrained IoT devices | REST-like, low power | Less reliable |
| HTTP/WebSockets | Web + robots | Widely supported | Higher overhead |
👉 Choose MQTT when:
- You need real-time, low-overhead messaging.
- Devices have limited CPU/bandwidth.
- Robotics applications require scalable pub/sub communication.
9. Conclusion
MQTT is a cornerstone of RobotOps – enabling robots, sensors, and control centers to communicate efficiently. By integrating MQTT with CI/CD pipelines, cloud services, and monitoring tools, robotics teams achieve:
- Faster deployments
- Real-time visibility
- Predictive maintenance
- Scalable fleet management
Future Trends
- MQTT v5 adoption with enhanced features (shared subscriptions, better error handling).
- Increased integration with AI/ML-driven robotic decision-making.
- Hybrid cloud + edge MQTT deployments for robotics at scale.
Next Steps
- Explore Eclipse Mosquitto and HiveMQ.
- Experiment with MQTT in ROS (Robot Operating System).
- Join community: MQTT.org and Eclipse Paho.